DJI Phantom 2 is the second generation quadcopter of the Phantom series produced by DJI. Compared with the first generation, the second generation adopts a new smart battery design. Battery information and GPS information are communicated through the CAN interface. This production is divided into two parts. The first is to decode the battery information, GPS information, etc. of the DJI Phantom 2 series quadcopter through stm32 plus can chip, decode the CAN interface, and superimpose it into the camera image, so as to facilitate understanding of the status of the aircraft during flight, and decode a The remote control channel performs the pitching operation of the wonton, and cooperates with the ground remote control head tracking to control the pitching state of the wonton in real time, and sends it to the ground pilot's VR glasses in real time through simulated image transmission, giving the pilot an immersive experience. The thrill of flying. The second is the production of head tracking. The head tracking sensor is designed using ardunio and GY-85 nine-axis module. It is placed on the top of the VR glasses, collects the head movements of the pilot, and sends signals to the quadcopter through the remote controller to control the aircraft. Pitching makes the pilot feel like he is sitting in the cabin of an aircraft.



OSD system block diagram
 Head chasing system block diagram
Head chasing system block diagram

OSD schematic diagram and finished product diagram

 Head tracking system finished picture:
Head tracking system finished picture:
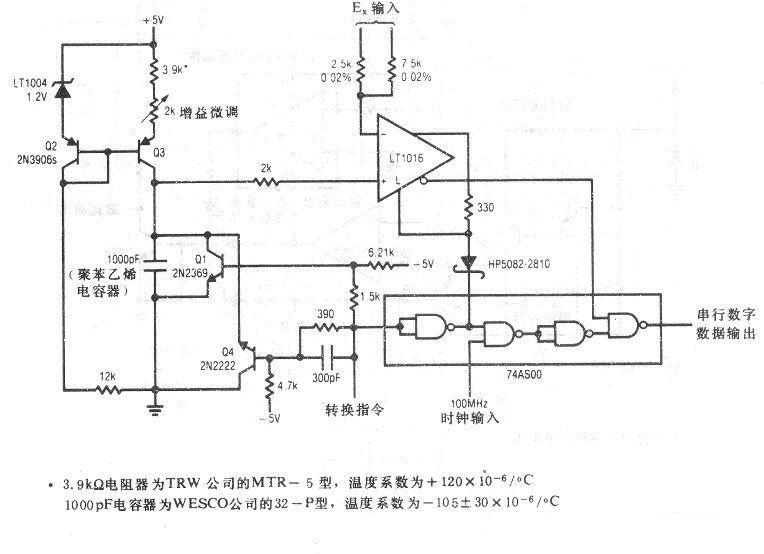
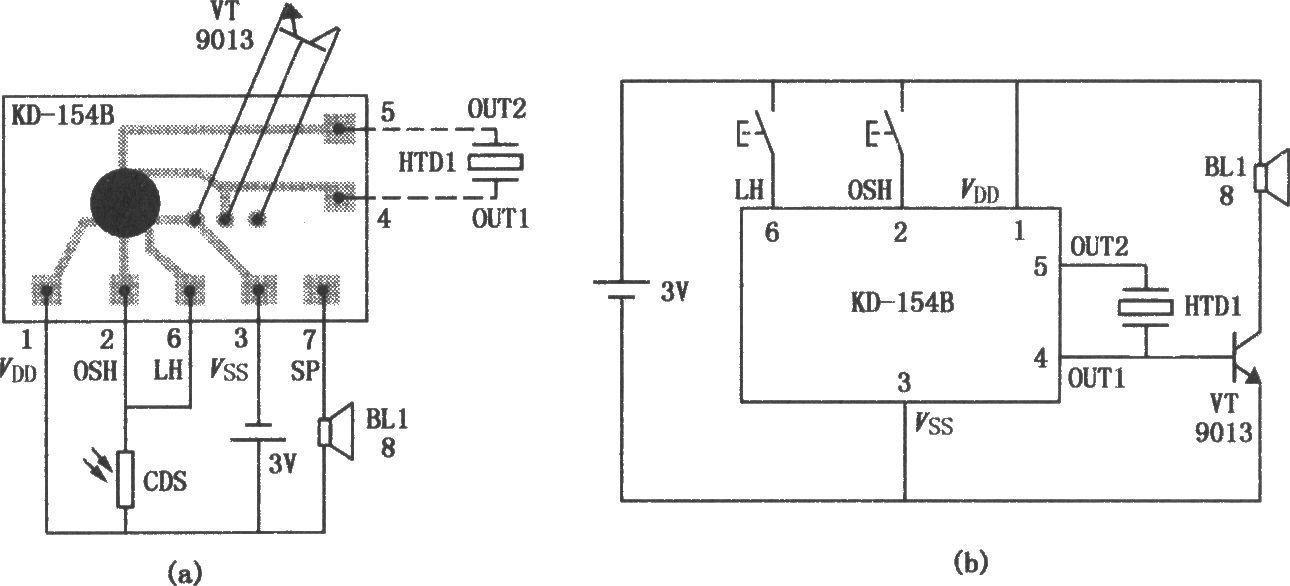
 Main principles: 1.osd head-up display system. The DJI Phantom 2 flight control system will continuously transmit various flight control status information and control information to the CAN bus. The OSD design is to decode the CAN data of the Phantom 2 and parse out the battery information, GPS information, and flight altitude of the quadcopter. , and the remote control joystick value, various flight control information is received and decoded through the STM32 can module, and sent to the OSD chip to combine the image information from the camera for character superposition, and then transmit it to the ground for reception through the 5.8G video wireless image transmission module . The ground receives and displays images through a 5.8g video receiving module. The decoded data of the two channels of the remote control is converted into pwm by stm32 and output to the steering gear, thereby controlling the steering and pitch of the steering gear, and realizing that the camera hanging on the steering gear moves according to the ground remote control signal. 2. Head chasing system. The head tracking system mainly consists of an ardunio board, a GY-85 9-axis sensor and two I2C interface DAC chips. Ready-made modules are used here. ardinuo reads the status of the 9-axis sensor and the data of the magnetometer, performs fusion calculations, converts them into changes in pitch, roll, and orientation, and converts them into voltages through the DAC chip to be read by the two channels of the remote control, simulating the remote control. The action of the resistor allows the movement of the head to be simulated as the movement of a rocker to control the rotation of the servo on the aircraft. In this way, the camera on the aircraft moves with the head movement of the ground controller, simulating the feeling of looking up, down, left, and right on the aircraft.
Main principles: 1.osd head-up display system. The DJI Phantom 2 flight control system will continuously transmit various flight control status information and control information to the CAN bus. The OSD design is to decode the CAN data of the Phantom 2 and parse out the battery information, GPS information, and flight altitude of the quadcopter. , and the remote control joystick value, various flight control information is received and decoded through the STM32 can module, and sent to the OSD chip to combine the image information from the camera for character superposition, and then transmit it to the ground for reception through the 5.8G video wireless image transmission module . The ground receives and displays images through a 5.8g video receiving module. The decoded data of the two channels of the remote control is converted into pwm by stm32 and output to the steering gear, thereby controlling the steering and pitch of the steering gear, and realizing that the camera hanging on the steering gear moves according to the ground remote control signal. 2. Head chasing system. The head tracking system mainly consists of an ardunio board, a GY-85 9-axis sensor and two I2C interface DAC chips. Ready-made modules are used here. ardinuo reads the status of the 9-axis sensor and the data of the magnetometer, performs fusion calculations, converts them into changes in pitch, roll, and orientation, and converts them into voltages through the DAC chip to be read by the two channels of the remote control, simulating the remote control. The action of the resistor allows the movement of the head to be simulated as the movement of a rocker to control the rotation of the servo on the aircraft. In this way, the camera on the aircraft moves with the head movement of the ground controller, simulating the feeling of looking up, down, left, and right on the aircraft.
stm32f103c8t6 Product number: C8734 tja1050 Product number: C112947 at7456 Product number: C82351 atmega328 Product number: C14877 mcp4725 Product number: C61423 GY-85 module https://item.taobao.com/item.htm?spm=a230r.1.14 .36.76 bf5236XgcH1&id=35070081530&ns=1&abbucket=5#detail
skylink_osd_p2_V1.0_PCB.zip schematic diagram and PCB file (using kicad software)
OSD software process
 head chasing software process
head chasing software process
 osd DJI can information decoding code
osd DJI can information decoding code
uint16_t NazaCanDecoderLib::decode()
{
uint16_t msgId = NAZA_MESSAGE_NONE;
if(can.available())
{
can.read(&RxMessage);
if(RxMessage.StdId == 0x090) canMsgIdIdx = 0;
else if(RxMessage.StdId == 0x108) canMsgIdIdx = 1;
else if(RxMessage.StdId == 0x7F8) canMsgIdIdx = 2;
else return msgId; // we don't care about other CAN messages
for(uint8_t i = 0; i < RxMessage.DLC; i++)
{
canMsgByte = RxMessage.Data[i];
if(collectData[canMsgIdIdx] == 1)
{
msgBuf[canMsgIdIdx].bytes[msgIdx[canMsgIdIdx]] = canMsgByte;
if(msgIdx[canMsgIdIdx] == 3)
{
msgLen[canMsgIdIdx] = msgBuf[canMsgIdIdx].header.len;
}
msgIdx[canMsgIdIdx] += 1;
if((msgIdx[canMsgIdIdx] > (msgLen[canMsgIdIdx] + 8)) || (msgIdx[canMsgIdIdx] > 256)) collectData[canMsgIdIdx] = 0;
}
// Look fo header
if(canMsgByte == 0x55) { if(header[canMsgIdIdx] == 0) header[canMsgIdIdx] = 1; else if(header[canMsgIdIdx] == 2) header[canMsgIdIdx] = 3; else header[canMsgIdIdx] = 0;}
else if(canMsgByte == 0xAA) { if(header[canMsgIdIdx] == 1) header[canMsgIdIdx] = 2; else if(header[canMsgIdIdx] == 3) { header[canMsgIdIdx] = 0; collectData[canMsgIdIdx] = 1; msgIdx[canMsgIdIdx] = 0; } else header[canMsgIdIdx] = 0;}
else header[canMsgIdIdx] = 0;
// Look fo footer
if(canMsgByte == 0x66) { if(footer[canMsgIdIdx] == 0) footer[canMsgIdIdx] = 1; else if(footer[canMsgIdIdx] == 2) footer[canMsgIdIdx] = 3; else footer[canMsgIdIdx] = 0;}
else if(canMsgByte == 0xCC) { if(footer[canMsgIdIdx] == 1) footer[canMsgIdIdx] = 2; else if(footer[canMsgIdIdx] == 3) { footer[canMsgIdIdx] = 0; if(collectData[canMsgIdIdx] != 0) collectData[canMsgIdIdx] = 2; } else footer[canMsgIdIdx] = 0;}
else footer[canMsgIdIdx] = 0;
if(collectData[canMsgIdIdx] == 2)
{
if(msgIdx[canMsgIdIdx] == (msgLen[canMsgIdIdx] + 8))
{
if(msgBuf[canMsgIdIdx].header.id == NAZA_MESSAGE_MSG1002)
{
float magCalX = msgBuf[canMsgIdIdx].msg1002.magCalX;
float magCalY = msgBuf[canMsgIdIdx].msg1002.magCalY;
headingNc = -atan2(magCalY, magCalX) / M_PI * 180.0;
if(headingNc < 0) headingNc += 360.0;
float headCompX = msgBuf[canMsgIdIdx].msg1002.headCompX;
float headCompY = msgBuf[canMsgIdIdx].msg1002.headCompY;
heading = atan2(headCompY, headCompX) / M_PI * 180.0;
if(heading < 0) heading += 360.0;
sat = msgBuf[canMsgIdIdx].msg1002.numSat;
gpsAlt = msgBuf[canMsgIdIdx].msg1002.altGps;
lat = msgBuf[canMsgIdIdx].msg1002.lat / M_PI * 180.0;
lon = msgBuf[canMsgIdIdx].msg1002.lon / M_PI * 180.0;
alt = msgBuf[canMsgIdIdx].msg1002.altBaro;
float nVel = msgBuf[canMsgIdIdx].msg1002.northVelocity;
float eVel = msgBuf[canMsgIdIdx].msg1002.eastVelocity;
spd = sqrt(nVel * nVel + eVel * eVel);
cog = atan2(eVel, nVel) / M_PI * 180;
if(cog < 0) cog += 360.0;
vsi = -msgBuf[canMsgIdIdx].msg1002.downVelocity;
msgId = NAZA_MESSAGE_MSG1002;
}
else if(msgBuf[canMsgIdIdx].header.id == NAZA_MESSAGE_MSG1003)
{
uint32_t dateTime = msgBuf[canMsgIdIdx].msg1003.dateTime;
second = dateTime & 0x3f; dateTime >>= 6; //0b00111111
minute = dateTime & 0x3f; dateTime >>= 6; //0b00111111
hour = dateTime & 0x0f; dateTime >>= 4; //0b00001111
day = dateTime & 0x3f; dateTime >>= 5; if(hour > 7) day++; //0b00011111
month = dateTime & 0x0f; dateTime >>= 4; //0b00001111
year = dateTime & 0x7f; //0b01111111
gpsVsi = -msgBuf[canMsgIdIdx].msg1003.downVelocity;
vdop = (double)msgBuf[canMsgIdIdx].msg1003.vdop / 100;
double ndop = (double)msgBuf[canMsgIdIdx].msg1003.ndop / 100;
double edop = (double)msgBuf[canMsgIdIdx].msg1003.edop / 100;
hdop = sqrt(ndop * ndop + edop * edop);
uint8_t fixType = msgBuf[canMsgIdIdx].msg1003.fixType;
uint8_t fixFlags = msgBuf[canMsgIdIdx].msg1003.fixStatus;
switch(fixType)
{
case 2 : fix = FIX_2D; break;
case 3 : fix = FIX_3D; break;
default: fix = NO_FIX; break;
}
if((fix != NO_FIX) && (fixFlags & 0x02)) fix = FIX_DGPS;
msgId = NAZA_MESSAGE_MSG1003;
}
else if(msgBuf[canMsgIdIdx].header.id == NAZA_MESSAGE_MSG1009)
{
for(uint8_t j = 0; j < 10; j++)
{
rcIn[j] = msgBuf[canMsgIdIdx].msg1009.rcIn[j];
}
#ifndef GET_SMART_BATTERY_DATA
battery = msgBuf[canMsgIdIdx].msg1009.batVolt;
#endif
// rollRad = msgBuf[canMsgIdIdx].msg1009.roll;
// pitchRad = msgBuf[canMsgIdIdx].msg1009.pitch;
rollRad = msgBuf[canMsgIdIdx].msg1009.stabRollIn;
pitchRad = msgBuf[canMsgIdIdx].msg1009.stabPitchIn;
roll = (int8_t)(rollRad*0.1);
pitch = (int8_t)(pitchRad*0.1);
// roll = (int8_t)(rollRad * 180.0 / M_PI);
// pitch = (int8_t)(pitchRad * 180.0 / M_PI);
mode = (NazaCanDecoderLib::mode_t)msgBuf[canMsgIdIdx].msg1009.flightMode;
msgId = NAZA_MESSAGE_MSG1009;
}
#ifdef GET_SMART_BATTERY_DATA
else if(msgBuf[canMsgIdIdx].header.id == NAZA_MESSAGE_MSG0926)
{
battery = msgBuf[canMsgIdIdx].msg0926.voltage;
batteryPercent = msgBuf[canMsgIdIdx].msg0926.chargePercent;
for(uint8_t j = 0; j < 3; j++)
{
batteryCell[j] = msgBuf[canMsgIdIdx].msg0926.cellVoltage[j];
}
msgId = NAZA_MESSAGE_MSG0926;
}
#endif
}
collectData[canMsgIdIdx] = 0;
}
}
}
return msgId;
}
Head pursuit system fusion code
//--------------------------------------------------------------------------------------
// Func: Filter
// Desc: Filters / merges sensor data.
//--------------------------------------------------------------------------------------
void FilterSensorData()
{
int temp = 0;
// Used to set initial values.
if (resetValues == 1)
{
#if FATSHARK_HT_MODULE
digitalWrite(BUZZER, HIGH);
#endif
resetValues = 0;
tiltStart = 0;
panStart = 0;
rollStart = 0;
UpdateSensors();
GyroCalc();
AccelCalc();
MagCalc();
panAngle = 0;
tiltStart = accAngle[0];
panStart = magAngle[2];
rollStart = accAngle[1];
#if FATSHARK_HT_MODULE
digitalWrite(BUZZER, LOW);
#endif
}
// Simple FilterSensorData, uses mainly gyro-data, but uses accelerometer to compensate for drift
rollAngle = (rollAngle + ((gyroRaw[0] - gyroOff[0]) * cos((tiltAngle - 90) / 57.3) + (gyroRaw[2] - gyroOff[2]) * sin((tiltAngle - 90) / 57.3)) / (SAMPLERATE * SCALING_FACTOR)) * gyroWeightTiltRoll + accAngle[1] * (1 - gyroWeightTiltRoll);
tiltAngle = (tiltAngle + ((gyroRaw[1] - gyroOff[1]) * cos((rollAngle - 90) / 57.3) + (gyroRaw[2] - gyroOff[2]) * sin((rollAngle - 90) / 57.3) * -1) / (SAMPLERATE * SCALING_FACTOR)) * gyroWeightTiltRoll + accAngle[0] * (1 - gyroWeightTiltRoll);
panAngle = (panAngle + ((gyroRaw[2] - gyroOff[2]) * cos((tiltAngle - 90) / 57.3) + (((gyroRaw[0] - gyroOff[0]) * -1) * (sin((tiltAngle - 90) / 57.3)) ) + ( ((gyroRaw[1] - gyroOff[1]) * 1) * (sin((rollAngle - 90) / 57.3)))) / (SAMPLERATE * SCALING_FACTOR)) * GyroWeightPan + magAngle[2] * (1 - GyroWeightPan);
if (TrackerStarted)
{
// All low-pass filters
tiltAngleLP = tiltAngle * tiltRollBeta + (1 - tiltRollBeta) * lastTiltAngle;
lastTiltAngle = tiltAngleLP;
rollAngleLP = rollAngle * tiltRollBeta + (1 - tiltRollBeta) * lastRollAngle;
lastRollAngle = rollAngleLP;
panAngleLP = panAngle * panBeta + (1 - panBeta) * lastPanAngle;
lastPanAngle = panAngleLP;
float panAngleTemp = panAngleLP * panInverse * panFactor;
if ( (panAngleTemp > -panMinPulse) && (panAngleTemp < panMaxPulse) )
{
temp = servoPanCenter + panAngleTemp;
channel_value[htChannels[0]] = (int)temp;
}
float tiltAngleTemp = (tiltAngleLP - tiltStart) * tiltInverse * tiltFactor;
if ( (tiltAngleTemp > -tiltMinPulse) && (tiltAngleTemp < tiltMaxPulse) )
{
temp = servoTiltCenter + tiltAngleTemp;
channel_value[htChannels[1]] = temp;
}
float rollAngleTemp = (rollAngleLP - rollStart) * rollInverse * rollFactor;
if ( (rollAngleTemp > -rollMinPulse) && (rollAngleTemp < rollMaxPulse) )
{
temp = servoRollCenter + rollAngleTemp;
channel_value[htChannels[2]] = temp;
}
}
}
ebox_skylink_osd_p2_fw_v1.0.zip osd source code skylink_osd_p2_PC_v1.0.zip osd host computer code DIY_Headtracker.zip head tracking code and design
Video 1: https://v.qq.com/x/page/w05395c58zm.html?start=3 Video 2: https://v.qq.com/x/page/o0540rby11f.html
This solution simulates the joystick action of the remote control, so it needs to be wired to the two channels of the remote control. This is actually very awkward. The next step is to use a 433m wireless module to replace the analog joystick to achieve true wire-free head tracking. .

All reference designs on this site are sourced from major semiconductor manufacturers or collected online for learning and research. The copyright belongs to the semiconductor manufacturer or the original author. If you believe that the reference design of this site infringes upon your relevant rights and interests, please send us a rights notice. As a neutral platform service provider, we will take measures to delete the relevant content in accordance with relevant laws after receiving the relevant notice from the rights holder. Please send relevant notifications to email: bbs_service@eeworld.com.cn.
It is your responsibility to test the circuit yourself and determine its suitability for you. EEWorld will not be liable for direct, indirect, special, incidental, consequential or punitive damages arising from any cause or anything connected to any reference design used.
Supported by EEWorld Datasheet
EEWorld
subscription
account

EEWorld
service
account

Automotive
development
community

Robot
development
community

About Us Customer Service Contact Information Datasheet Sitemap LatestNews



Room 1530, 15th Floor, Building B,
No.18 Zhongguancun Street,
Haidian District,
Beijing, Postal Code: 100190
China
Telephone: 008610 8235 0740
 京公网安备 11010802033920号
京公网安备 11010802033920号

 PTH12060WAH
PTH12060WAH