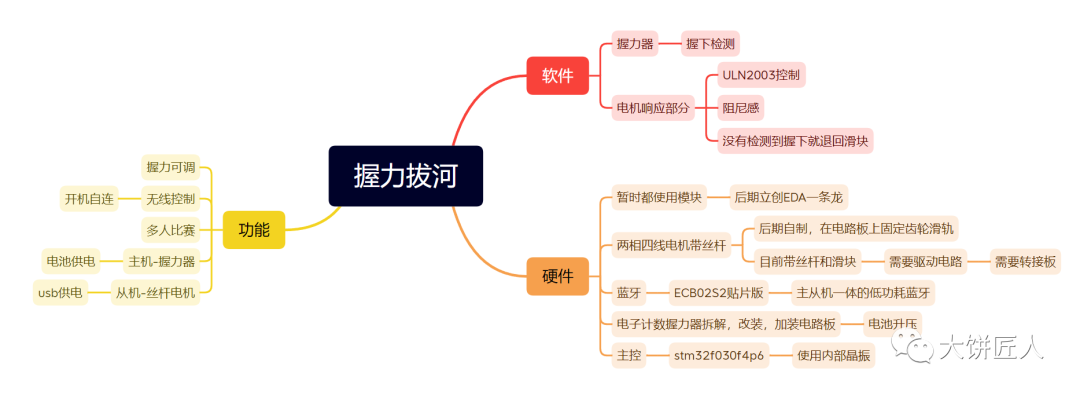
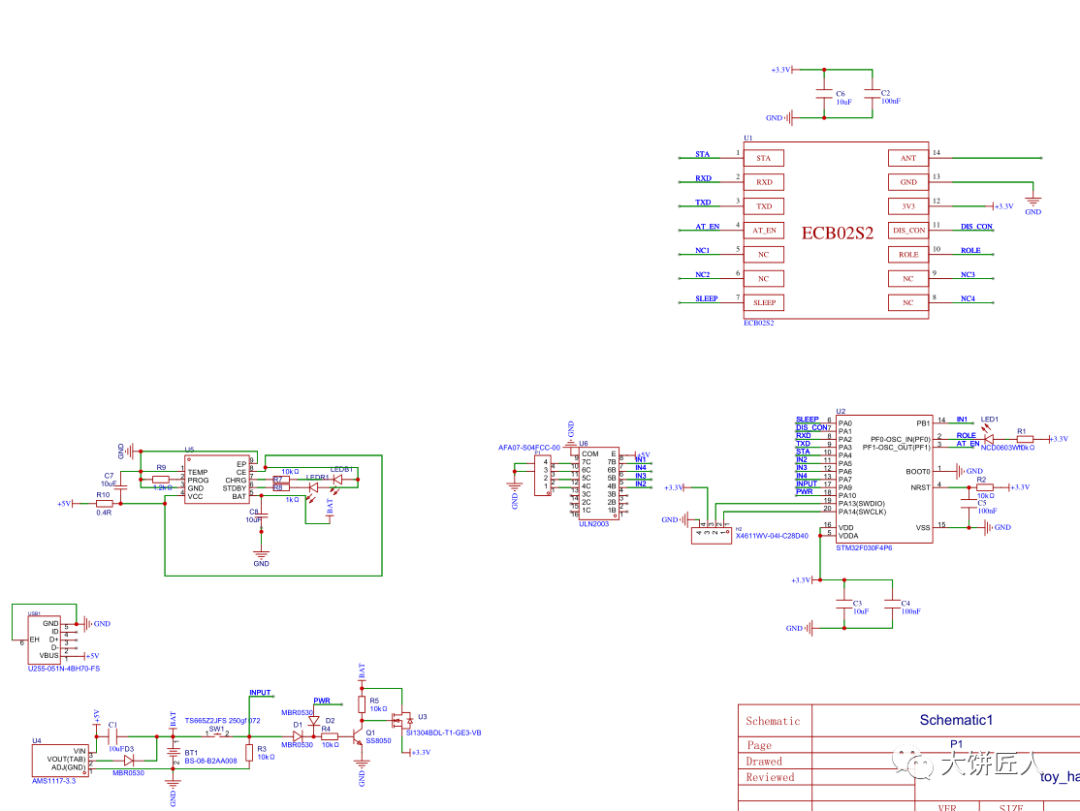
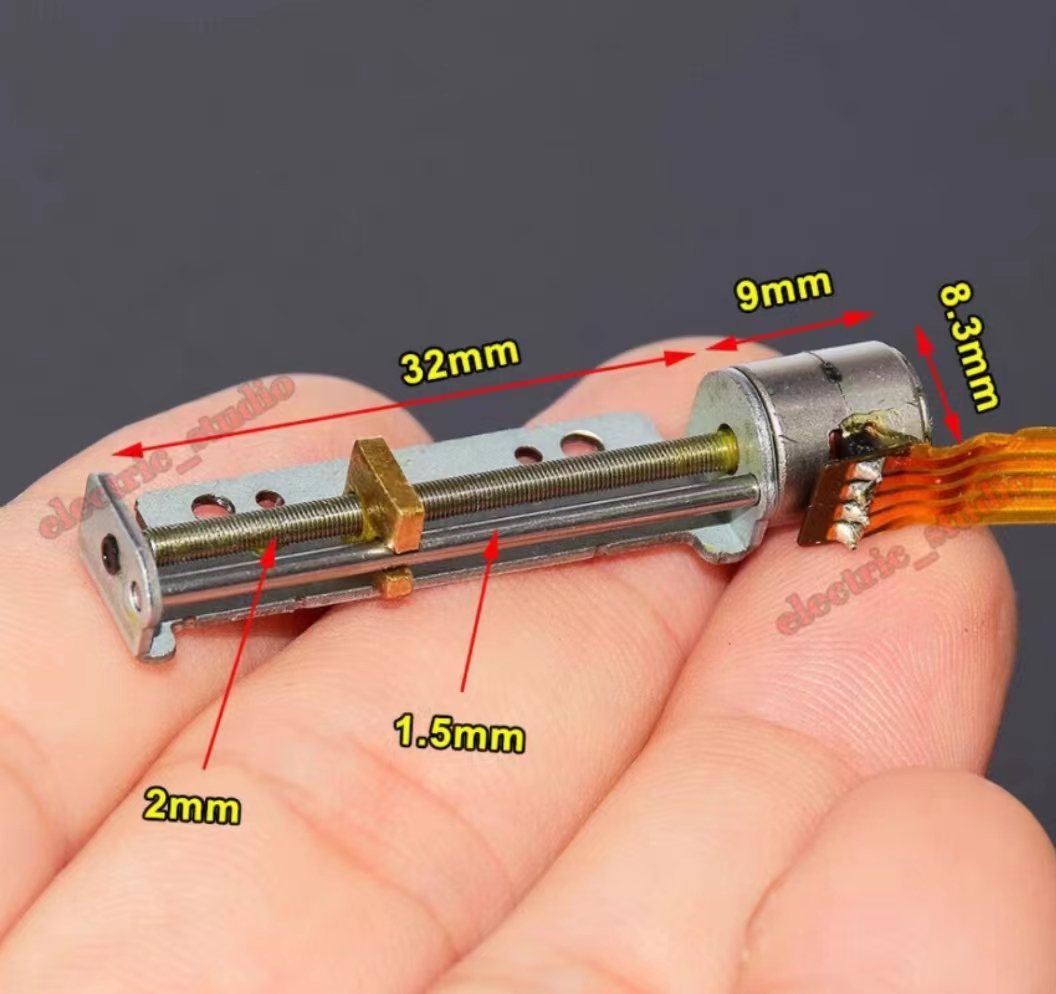
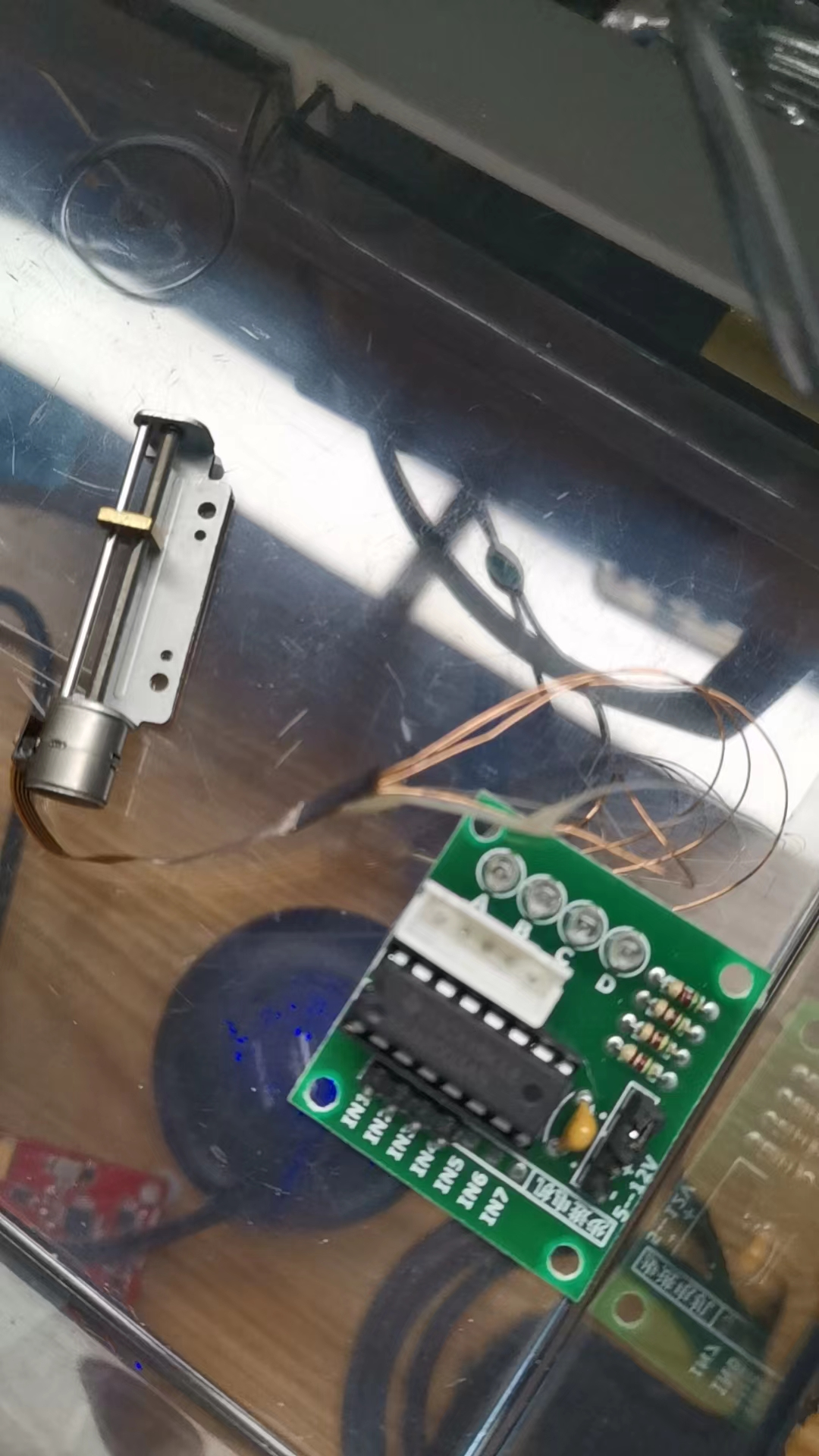
This article describes a modified
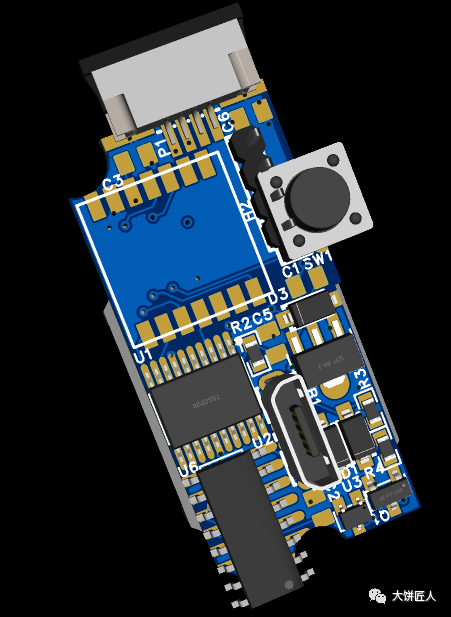
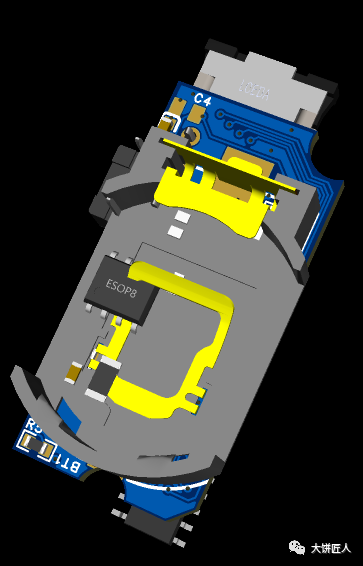
toy-hand game using an electronic grip strengthener to control a servo motor. The initial idea was to control a lead screw motor, allowing two sets of devices to control two lead screw motors for a "simulated tug-of-war." However, a hardware design flaw was discovered: the ULN2003 could not control a two-phase four-wire motor. Even after replacing the hardware with a drv8833, it still wouldn't work. The cause was suspected to be rust on the lead screw or excessive drive current. Therefore, this was temporarily shelved, and a servo motor was chosen instead. Until a more interesting scenario with the servo motor was devised, a globe was added to it. The development approach involves modifying the software for an electronic counter-type 5-60KG adjustable hand gripper to be more intelligent, fun, and competitive , ensuring master-slave compatibility. The servo motor control unit acts as the master, using an ECB02 Bluetooth module; the hand gripper acts as the slave, using an ECB01 module (cheaper, but only for slaves). AT commands are used to set the slave's MAC address, and the AT commands also specify the MAC address the master must bind to. The slave sends button status information to the master at intervals (milliseconds). Testing revealed that, possibly due to Bluetooth performance limitations, packet loss occurs. The master detects the slave's connection and disconnection status and controls the servo motor to perform different left and right rotations to indicate the master's real-time detection of the slave's (hand gripper's) pressed state and provide feedback. Currently, because the servo motor cannot rotate continuously 360 degrees, it can only rotate back and forth, and the servo motor may even rotate in reverse. Further program improvements and testing revealed unstable connections, likely due to the lack of a Bluetooth module antenna. The next hardware version will improve hardware compatibility between the ECB01 and ECB02 Bluetooth modules, including Bluetooth master -slave role indicator lights. The master-slave hardware has been made compatible to accommodate a non-mainstream FPC. The interface is a lead screw motor. An FPC-SMD socket was used to bring out a 2.0mm pitch SWD download port. In actual testing, it didn't work well, but it saved space. ULN2003 driver. Note that the electrical attributes of COM and E are incorrect in the diagram (╯□╰). Micro USB connection with indicator light charging circuit, 5V to 3.3V voltage regulator circuit , button detection circuit, reused as a switch circuit, power switch state latch circuit CR2032. The circuit board frame was made as compatible as possible with the original hand gripper circuit board, as shown in the picture below, but the shell still needs to be modified. Some places will be stuck, and the USB socket is currently slightly off-center. Note that the CR2032 and USB circuits can only be soldered with one power solution. The hardware has been centrally reused (PS, this part has not been tested). Some circuit functions have not been verified, so use with caution. Bluetooth performance is not very good, and the circuit needs to be improved later. Another attempt at a servo solution is a temporary solution. The hardware is jumpered. If the power switch state latch circuit is not used, and only USB is used, BAT and 3.3 Received another demonstration video: [Electronic Hand Grip Modification] [https://www.bilibili.com/video/BV1Vi4y167uv/?spm_id_from=333.999.0.0] Project Attachment: [Skill Summary 39 @ Hand Grip + STM32 + BLE + SG90 + Power Control] [https://pan.quark.cn/s/c10da3862709] (Extraction Code: HdY6) Bilibili: "大饼酱人" [https://space.bilibili.com/21938388] CSDN: "大饼酱人" [https://blog.csdn.net/Fei_Yang_YF] WeChat Official Account: "大饼酱人" QQ Group: Customizable or customizable source repository ([toy_hand_game: Stamina-consuming toy, using a hand grip to control servo rotation (gitee.com)]) ]【https://gitee.com/yangfei_addoil/toy_hand_game】













 京公网安备 11010802033920号
京公网安备 11010802033920号

 180-091PS7-17-8SE
180-091PS7-17-8SE



