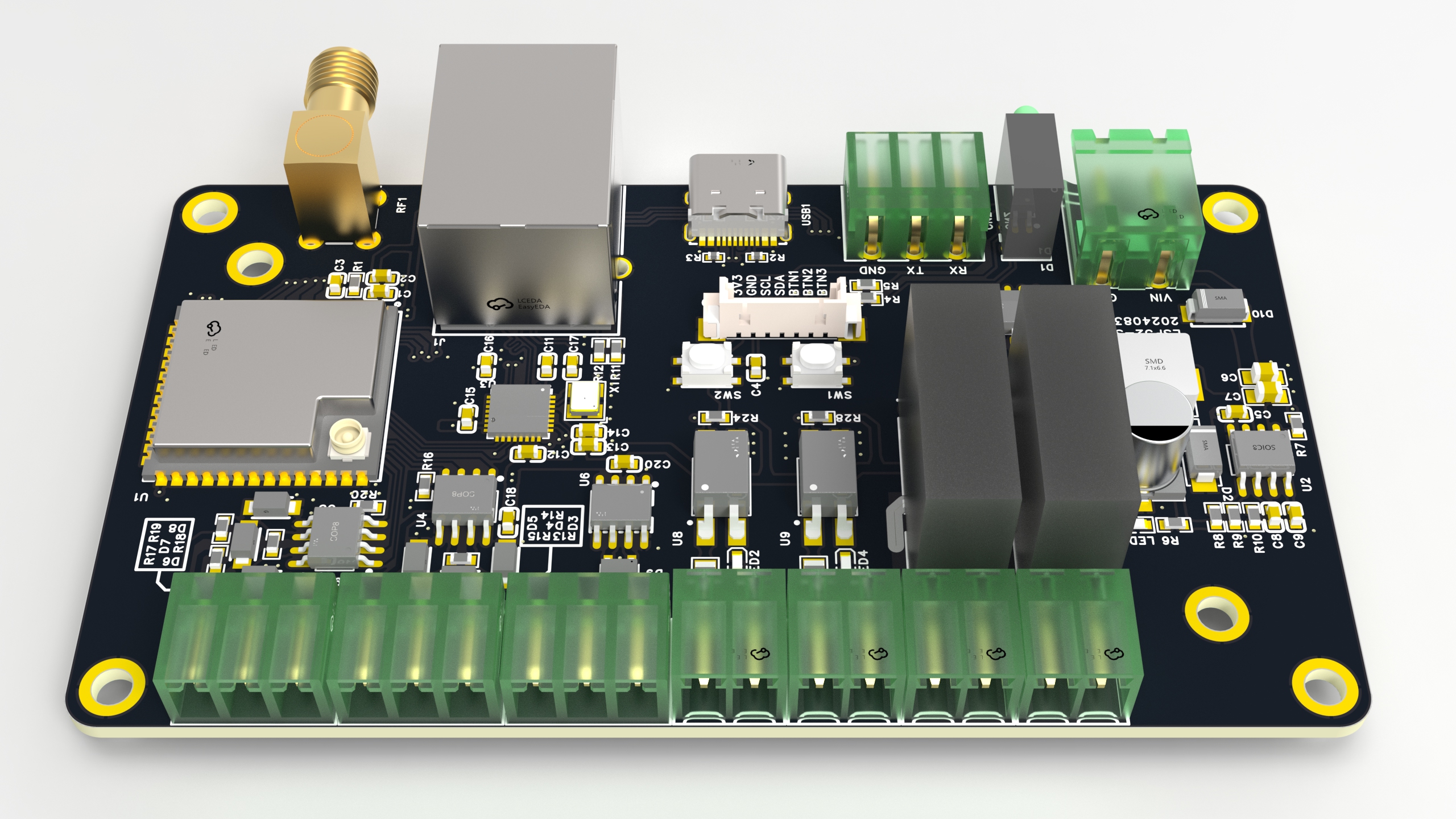
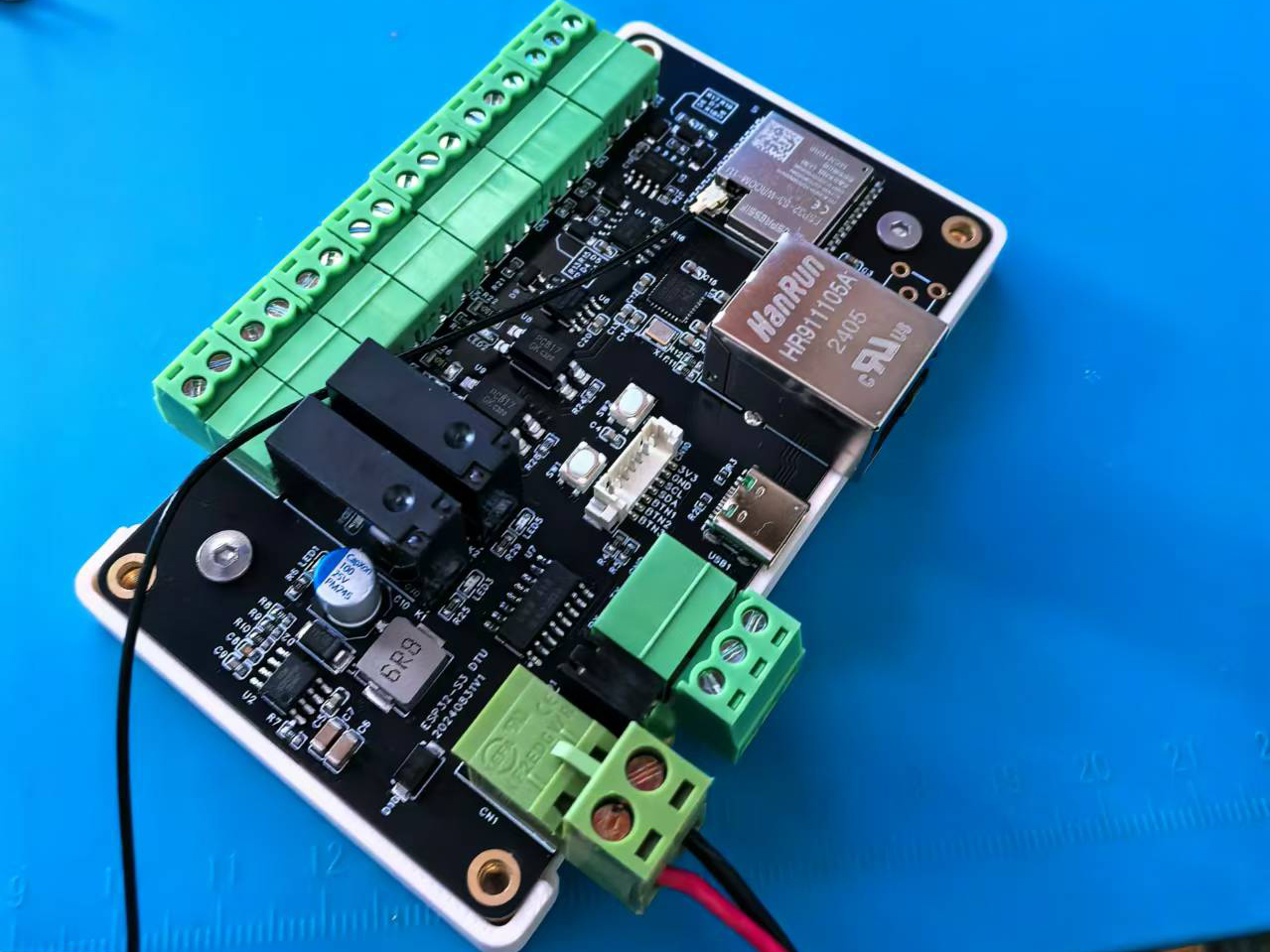
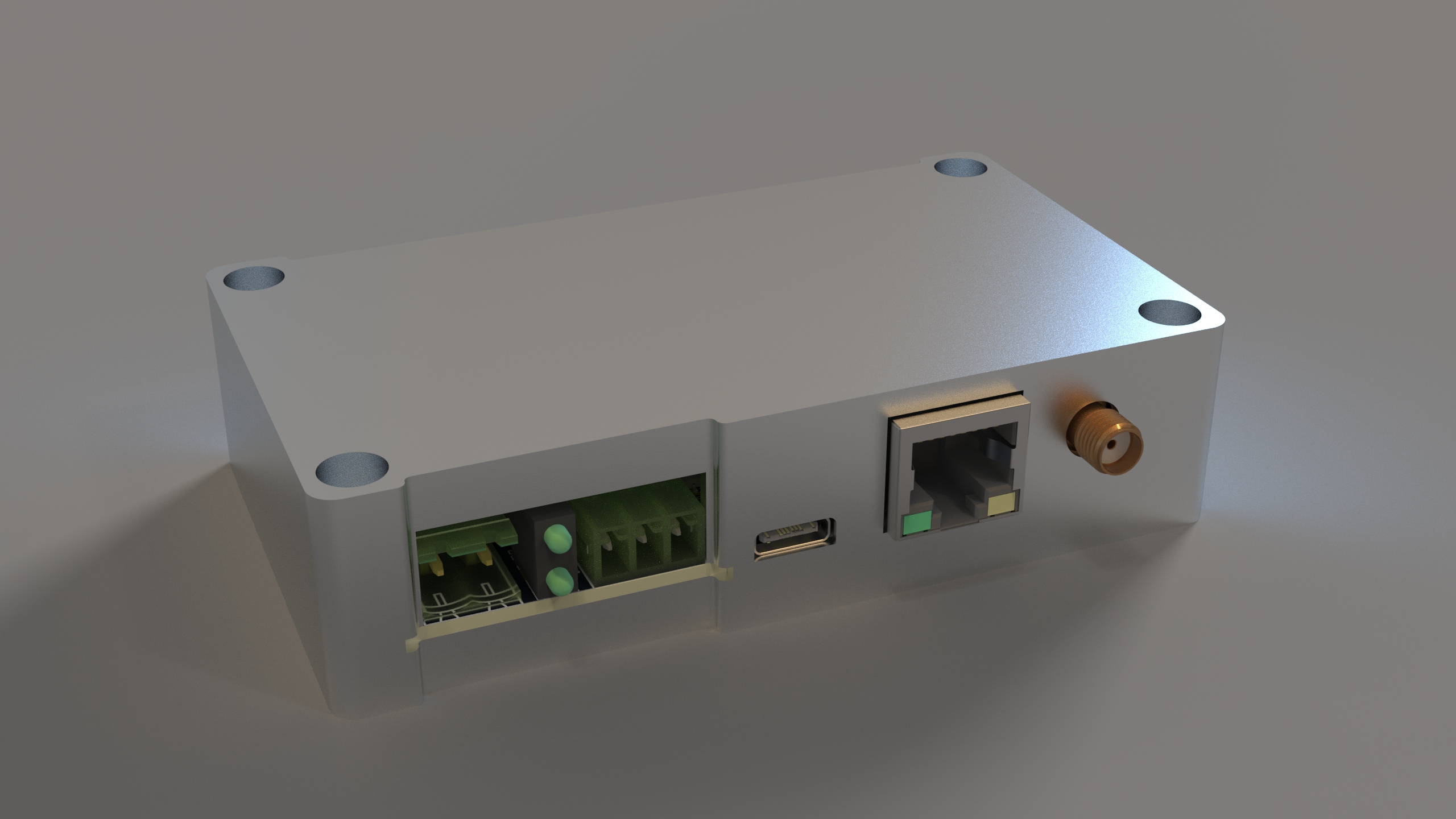
This project designs a DTU edge gateway based on the Espressif Systems ESP32-S3 module. Utilizing the high performance and low power consumption of the ESP32-S3 chip, a device capable of remote data transmission, real-time monitoring, and control is built. This project is applicable to multiple fields such as smart homes and industrial automation, supporting network connectivity and data transmission to the cloud via the chip's built-in Wi-Fi and an external Ethernet interface via SPI.
Utilizing the performance of the ESP32-S3, secondary development is performed to collect data from various sensors or devices and upload it to the cloud for further processing and analysis.
Through the module's Wi-Fi/Ethernet interfaces, the device can access Ethernet, supporting RS485/TTL to TCP data pass-through. (Other software functions are under implementation)
Terminal: Users can connect to the module terminal via USB interface and configure relevant parameters via command line.
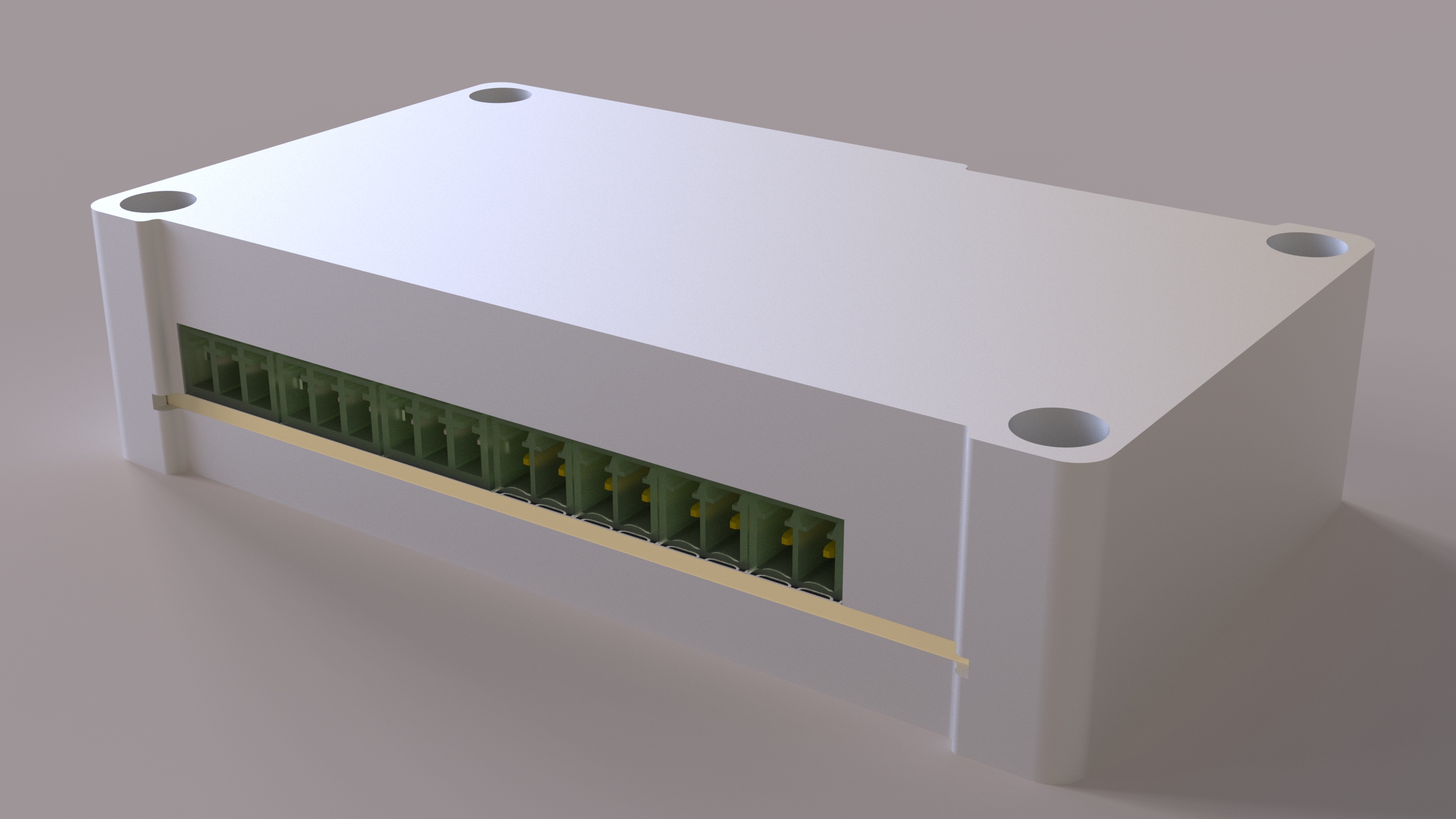
The RS485/CAN and power interfaces are equipped with TVS diodes to prevent damage from abnormal overvoltage.
input interface*2.
/output interface HF46F-024-HS1 24V relay driven by ULN2003 .
: Some components are difficult to purchase; please refer to the following link for purchase:
SGM6232 (LCSC is expensive; it can be purchased on Taobao).
https://item.taobao.com/item.htm?_u=92dklb455582&id=583922757198&spm=a1z09.2.0.0.10d92e8dAOrZiH
https://item.taobao.com/item.htm?_u=92dklb45eb26&id=566157069101&spm=a1z09.2.0.0.10d92e8dAOrZiH
RJ45 interface HR911105A (LCSC is relatively expensive, but can be purchased on Taobao; authenticity cannot be guaranteed!!!) CH390H:
https://item.taobao.com/item.htm?spm=a1z09.2.0.0.10d92e8dAOrZiH&id=717161946752&_u=92dklb4592b3 Power Supply Options: 1. DC Power Supply 2. 24V Switching Power Supply 3. 24V DC Adapter Power Supply DC Power Cable (Refer to purchase link: 0.75 sq mm DC5521 female connector cable - 30 cm): 24V Power Supply Reference Purchase Link (Color Classification: 24V 2A [Large Head 5.5MM] 3C Certification): https://detail.tmall.com/item.htm?id=645461549857&spm=a1z09.2.0.0.1b8d2e8dzMqIED&_u=92dklb4518a8 Connector Purchase Link 3.81 (Suitable for Data Interfaces) https://item.taobao.com/item.htm?_u=92dklb4538cc&id=522575305943&spm=a1z09.2.0.0.4a072e8dlUj9VZ 5.08 (for power connectors) https://item.taobao.com/item.htm?_u=92dklb4595f7&id=522579348831&spm=a1z09.2.0.0.4a072e8dlUj9VZ After drilling holes in the 3D housing, install using third-party connectors. https://item.taobao.com/item.htm?from=cart&id=671947800707&skuId=5016817435573&spm=a1z0d.6639537/202406.item.d671947800707.406b7484wncj4i The 3D printed outer shell requires 6 thermoplastic nuts for printing the bottom shell. See the link below for nut purchase links (select M3*4*4.2 [100 nuts]): https://detail.tmall.com/item.htm?from=cart&id=660426609931&skuId=4762019120810&spm=a1z0d.6639537/202406.item.d660426609931.406b7484wncj4i
https://detail.tmall.com/item.htm?_u=92dklb45b024&id=624811454452&spm=a1z09.2.0.0.10d92e8dAOrZiH
STEP Module Source Code (Under Development, requires ESP-IDF compilation and download),
Bamboo husk slices. 3mf
Project Overview:
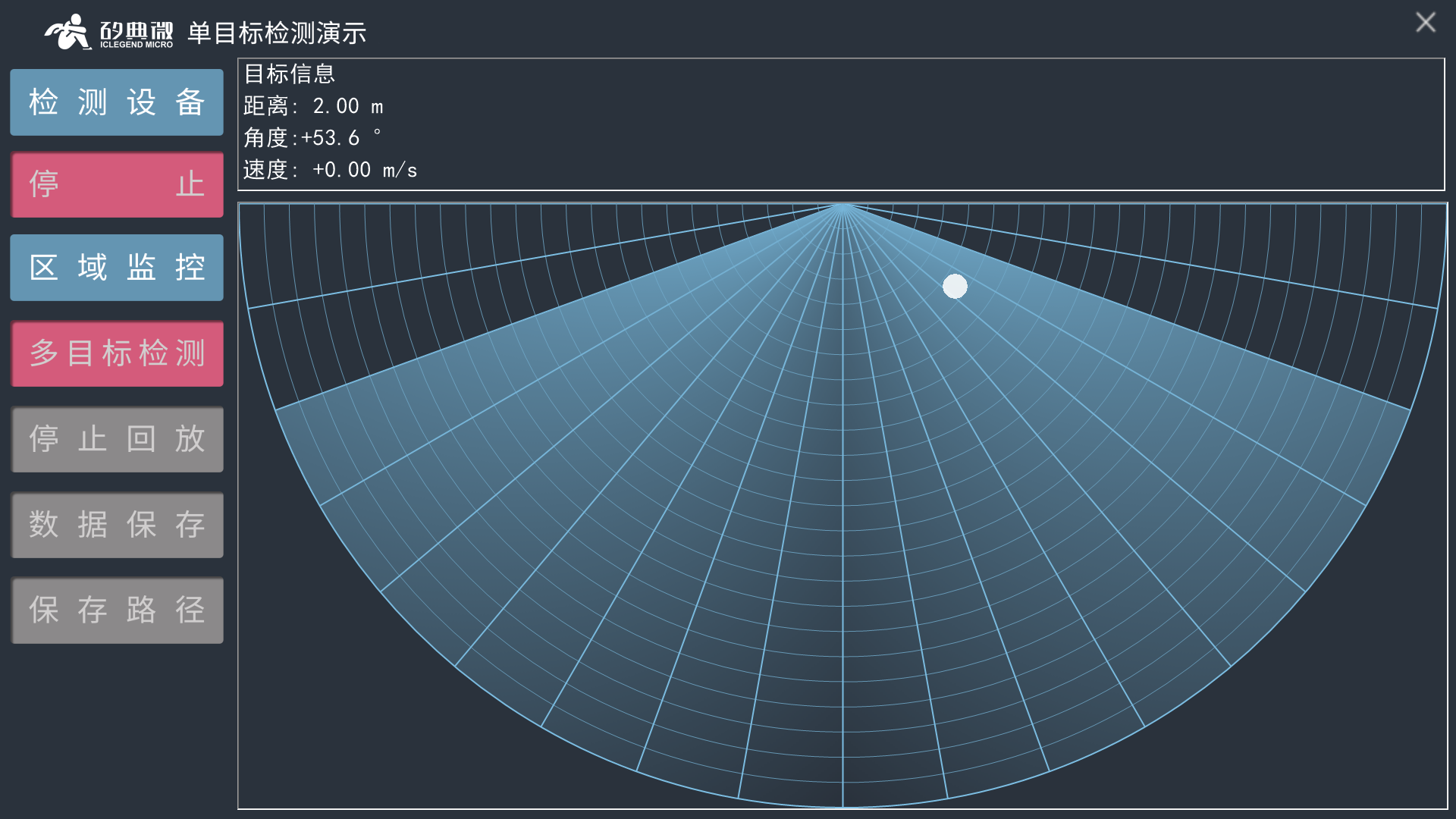
This project utilizes an intelligent human-following rotary table designed based on the STM32F103C8T6+Rd-03D radar. It adjusts the table to the corresponding angle based on the movement position of a human within a space.
Project Functions
: Automatic Rotation: The Rd-03D radar detects the trajectory of human movement in real time, obtaining corresponding spatial coordinates. The angle is calculated from these coordinates, and then a stepper motor is driven to rotate the table to the corresponding position, eliminating the need for manual operation.
Unmanned Calibration: When no one is in the space, the stepper motor automatically returns to its initial center position.
Project Parameters : The project
employs the Aisinco 24G millimeter-wave radar module—Rd-03D—with a built-in intelligent positioning and tracking algorithm. It can detect multiple targets within a specified area and report the results in real time. It accurately perceives the movement status of the human body and the surrounding area. The intelligent algorithm enables motion trajectory recognition and tracking, allowing for speed and distance measurement of targets within the area.
The STM32F103C8T6 chip, a classic general-purpose MCU, is used. Complete documentation is
provided. A stepper motor with four-phase five-wire, pulse control
, and Type-C interface power supply is selected, simplifying wiring.
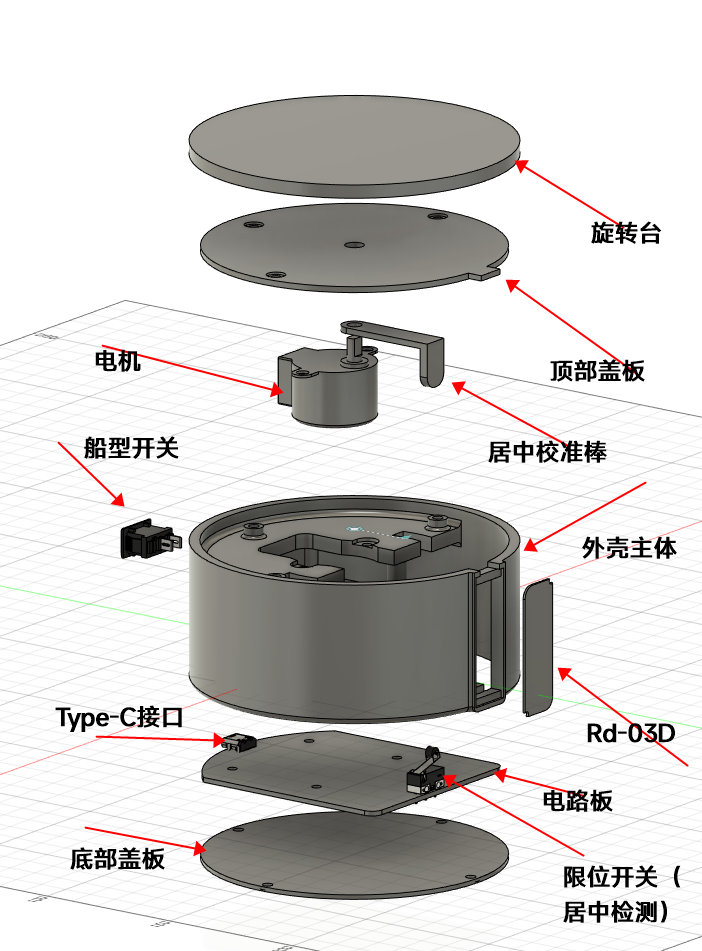
The radar host computer
structure design
consists of the following parts: bottom cover, main body (including circuit board), top cover, and rotating platform.
3D shell files are attached.
Software code
is provided as a compressed file attachment.
Note:
When multiple people are present, the radar will detect the target with the highest kinetic energy.
Place the radar facing the detection space
and keep the detection space as empty as possible. Actual
product images:
Figure 1: Top view (without rotating platform)

; Figure 2: Top view (without top cover);
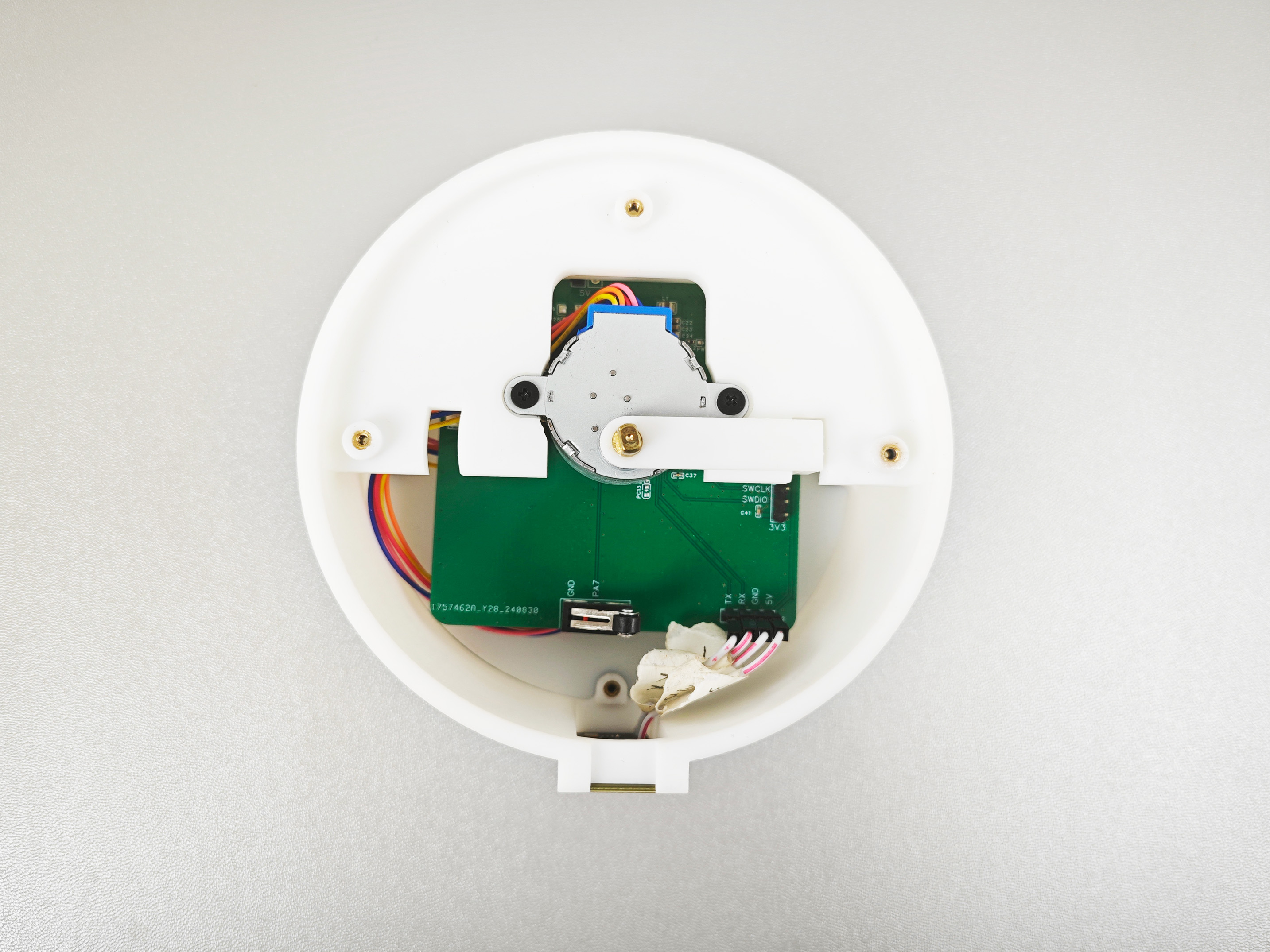
Figure 3: Complete display.

stm32f103c8t6_ucos-ii_demo.rar
3D shell file.rar
PDF_AiPi-RD-Rotary.zip
Altium_AiPi-RD-Rotary.zip
PADS_AiPi-RD-Rotary.zip
BOM_AiPi-RD-Rotary.xlsx
90796
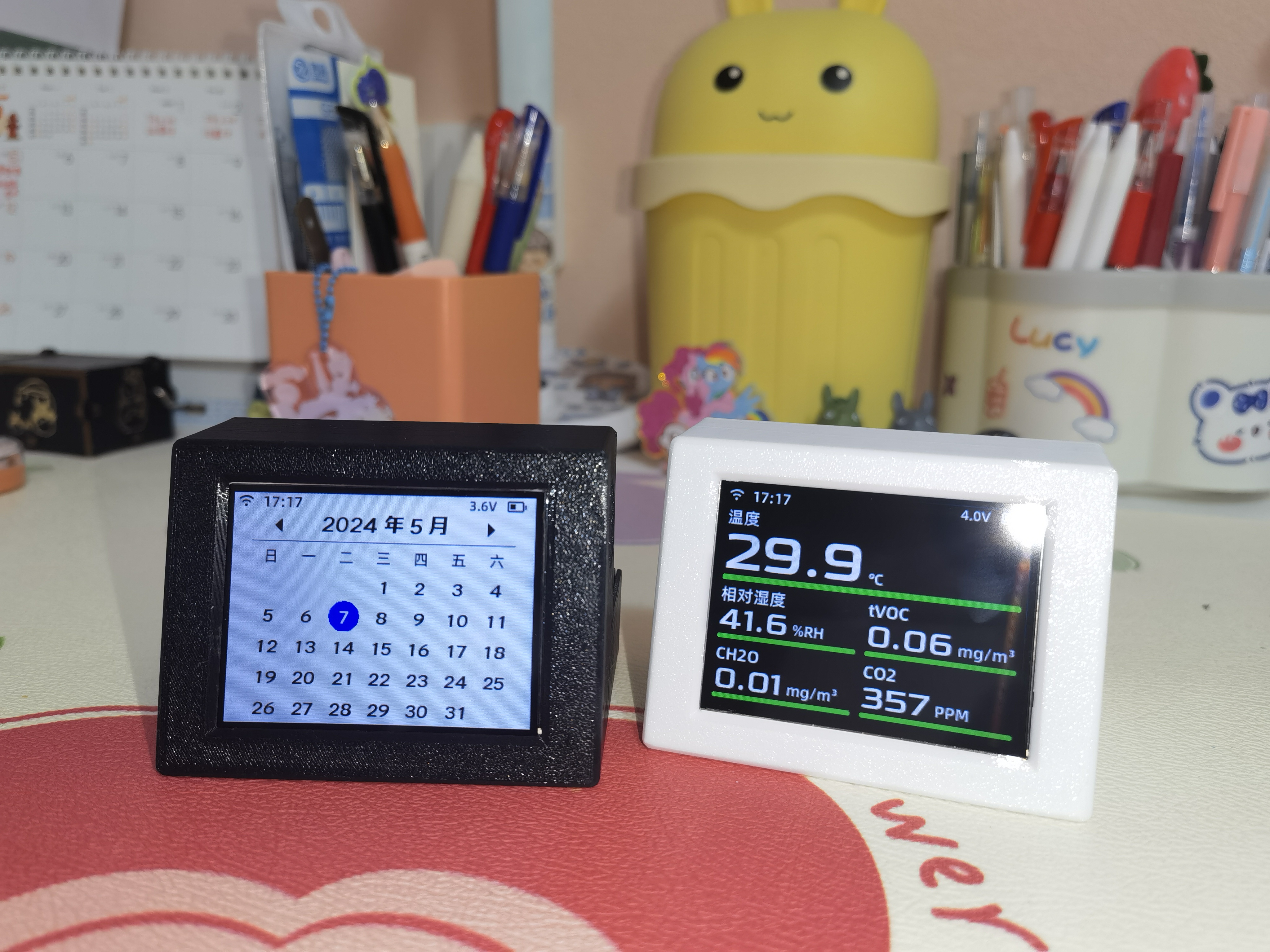
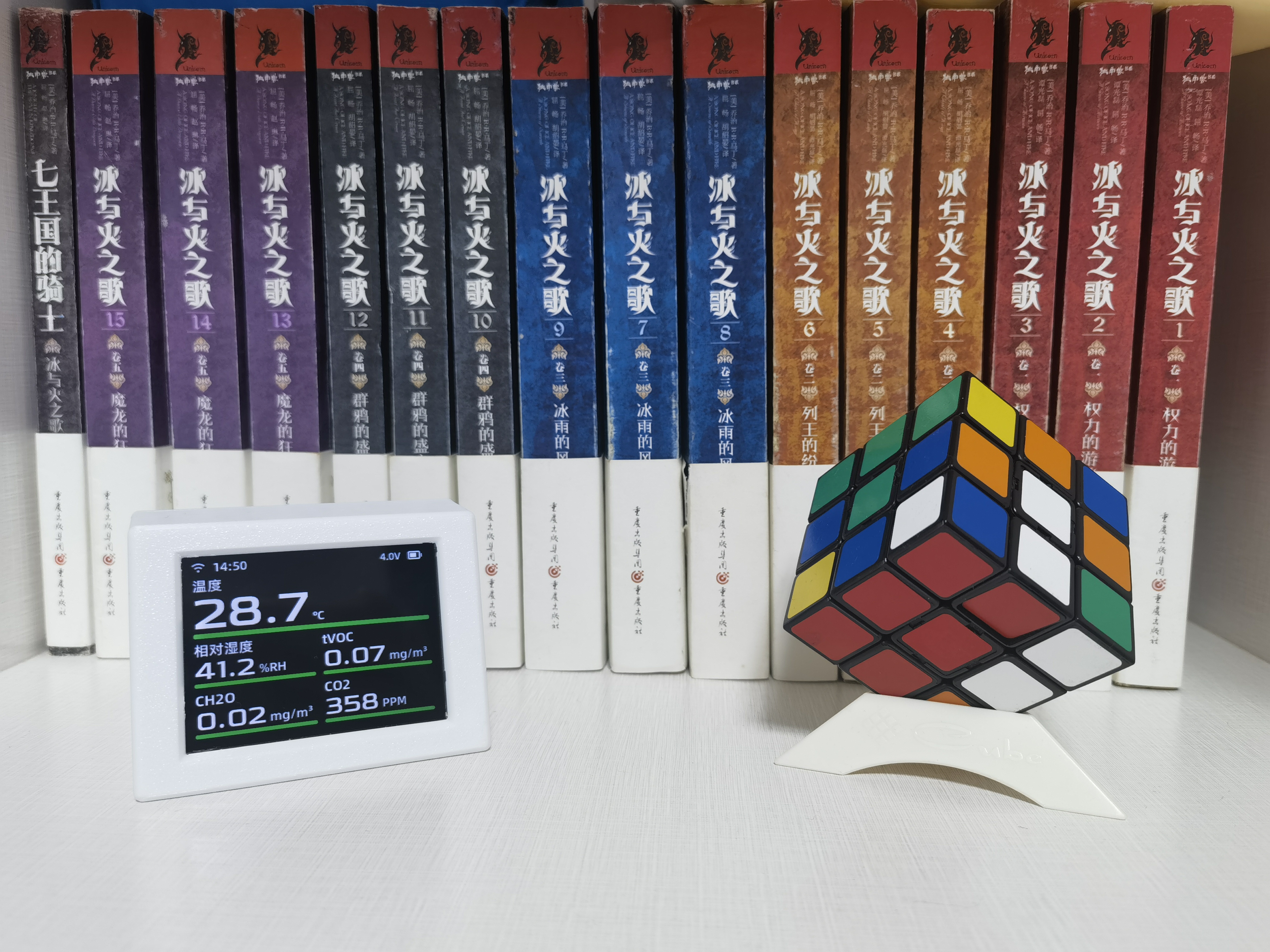
CC Temperature and Humidity Meter & Clock & Perpetual Calendar
I recently wanted to pack up my 3D printer, but I was missing a temperature and humidity sensor. The cheap ones online weren't good enough, and the ones I liked were ridiculously expensive, so I decided to make one myself.
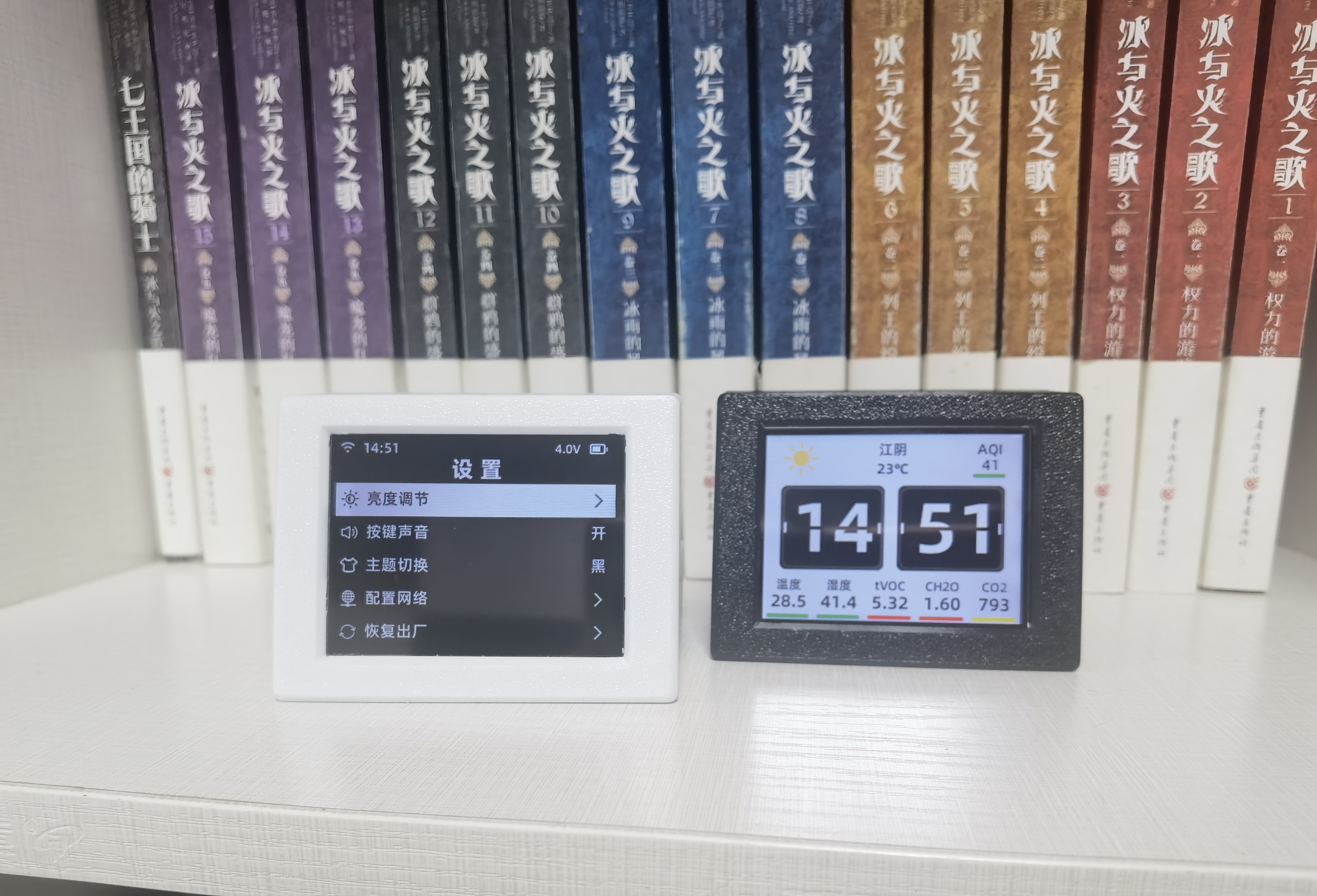
Besides functioning as a temperature and humidity sensor, it also has a clock, perpetual calendar, city weather, and air quality index functions.

The software
section is written using the Arduino IDE, and all pages use the native tft_Espi library.
Version 1.0 has five pages: temperature and humidity detection, clock & detection, city weather, calendar, and settings.
There are three buttons on the back: the side buttons are used to switch pages, and the middle button is used for confirmation with a short press and for sleep mode with a long press.
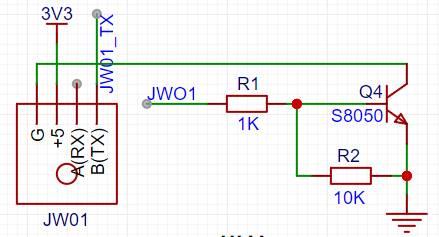
The main
controller selected is the ESP-wroom-32 module. Since it needs to be powered by a lithium battery pack, the power supply circuit does not use LDO, but uses a DCDC solution.
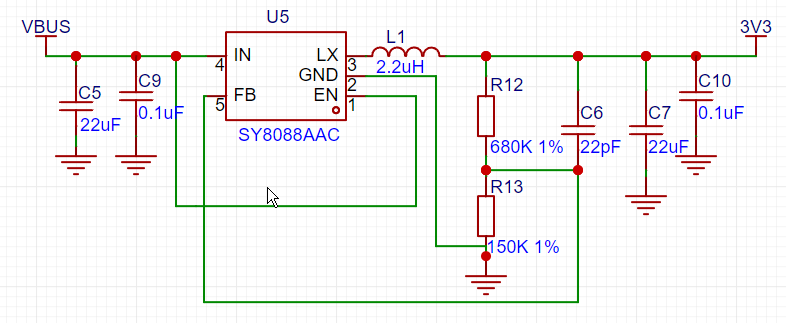
Several power-consuming components use transistors as switches. After sleep mode, the current is high.
Precautions:
1. Required libraries:
TFT_eSPI, OneButton, DFRobot_DHT20, ArduinoJson, NTPClient, ArduinoZlib (For the installation of this library, please refer to my Bilibili video: https://www.bilibili.com/video/BV1wj421Z7Ds/?vd_source=c106ac8c60f1249e356ef02bdcc85de7).
2. The parts of the project that need to be modified: (1) The key in the Common file. This is self-explanatory. Register it yourself on Hefeng Weather. If you don't know how to register, refer to the video link above. (2) In the Task file, adjust the adcOffset parameter if the voltage detection is inaccurate, as the error will definitely be different for each board, and this can only be corrected through code.
III. Pay close attention to the words highlighted in red in the BOM list; do not buy the wrong materials.
Lithium battery packs must be purchased with built-in protection chips, as the PCB does not have charging and discharging protection circuitry. The battery pack should contain a maximum of two 18650 batteries; more than that will not fit. Of course, it can also be used continuously while plugged in, as batteries are not cheap.
Demo video:
https://www.bilibili.com/video/BV15C411E7Jc/?vd_source=c106ac8c60f1249e356ef02bdcc85de7
Resource downloads:
CC Temperature and Humidity Meter 1.0 source code package: https://pan.quark.cn/s/2fc2e1064f08
tft_espi configuration file: https://pan.quark.cn/s/671f7b675051
BOM list (add purchase link on screen): https://pan.quark.cn/s/746a18b07f21
Shell files: https://pan.quark.cn/s/ad7dabe86efd
3D modeling source files: https://pan.quark.cn/s/075d7af6f176
PDF_CC Thermohygrometer & Clock & Perpetual Calendar.zip
Altium_CC Thermometer & Humidity Meter & Clock & Perpetual Calendar.zip
PADS_CC Thermometer & Humidity Meter & Clock & Perpetual Calendar.zip
BOM_CC Temperature and Humidity Meter & Clock & Perpetual Calendar.xlsx
90797
PAW3395 mouse based on STM32
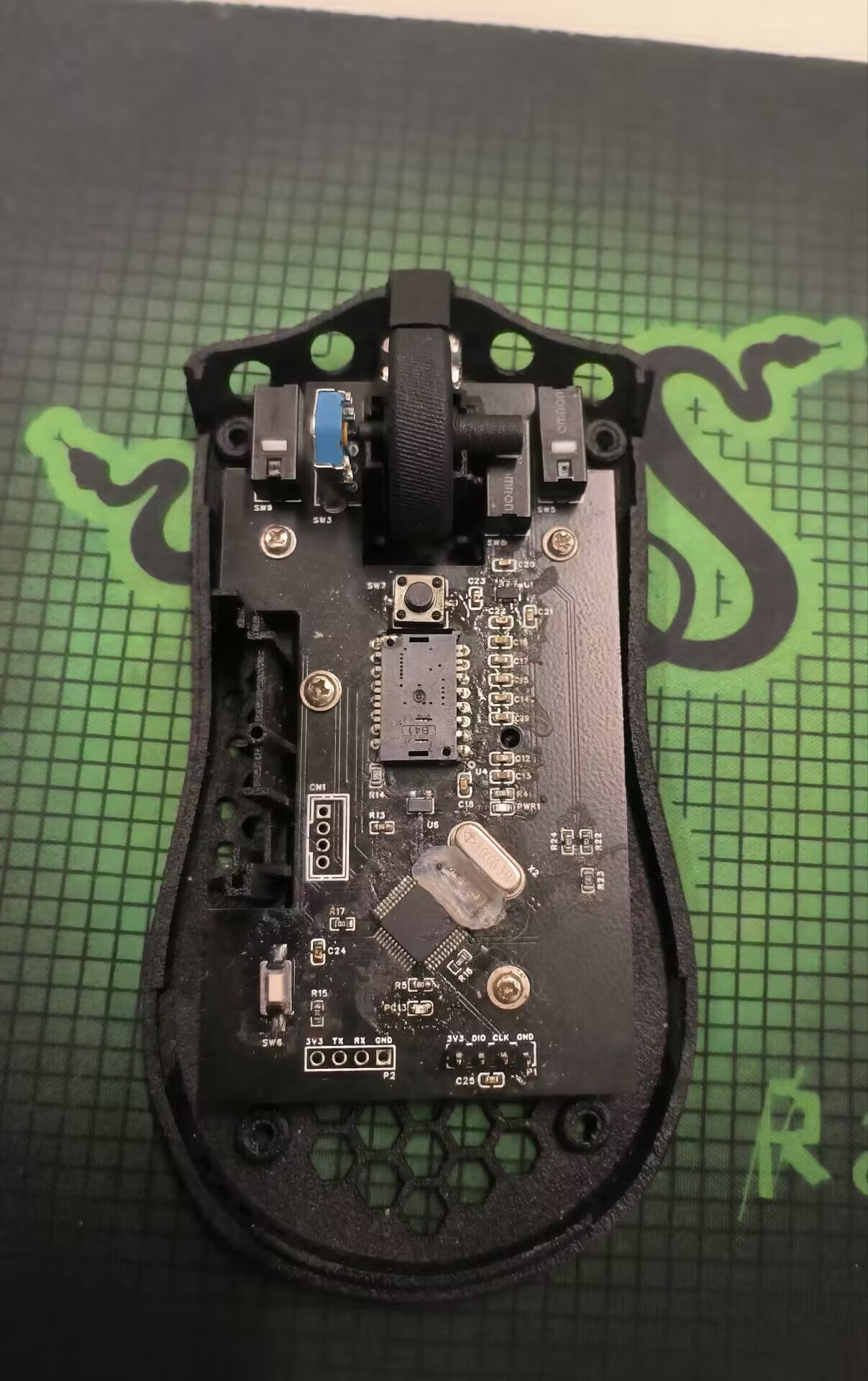
This project is a wired mouse based on the STM32F103C8T6 microcontroller. It uses the PixArt PAW3395 photoelectric sensor and communicates with the computer using the HID protocol. The nylon shell is 3D printed using LCSC's Monkey 3D printing technology.
Currently, it implements all the basic functions of commercially available mice.
I. Project Introduction
Bilibili Demo Video: https://www.bilibili.com/video/BV1BrH9ecEnd/?vd_source=cb3035aabee93b98268db84a2ab962fc
GitHub Open Source Address: https://github.com/Li-Dongze/stm32_paw3395_mouse
This project is a wired mouse based on the STM32F103C8T6 microcontroller. It uses the PixArt PAW3395 photoelectric sensor and communicates with the computer using the HID protocol. The nylon shell is 3D printed using LCSC's Monkey 3D printing technology. Project
Functionality:
Normal Mouse Functions: Cursor movement, left and right buttons, middle button, scroll wheel, DPI switching (LED flashes 3 times when DPI is switched).
Extended Functionality: Two custom buttons (interfaces reserved), not added in this example.

II. Motivation
I recently encountered an ADNS3080 optical flow sensor while working on digital image processing. It can generate black and white pixel images by taking close-up photos. After further investigation, I discovered that the sensor used in mice operates on the same principle, so I decided to make one myself. Adhering to the principle of doing it right, I chose the then-popular PAW3395 mouse sensor. For the main controller, I opted for the STM32F103C8T6, which was the most readily available.
III. Software Implementation
: Refer to the open-source GitHub address (detailed explanation available): https://github.com/Li-Dongze/stm32_paw3395_mouse
IV. Hardware Implementation:
The hardware is relatively simple, essentially consisting of an STM32 minimum system board + PAW3395 driver circuit + button and scroll wheel circuits, along with PCB and 3D shell adaptation. All details are included in the project file.
PAW3395 Purchase Link: [Taobao] http://e.tb.cn/h.gLP9ganzQMI5ptR?tk=80Nq3TwZ967 MF7997 "PAW3395DM-T6QU Gaming Mouse Sensor Optical Sensor PixArt Original Genuine Mouse Chip"
Click the link to open directly or search on Taobao to open directly.
Encoder Purchase Link: [Taobao] Limited Time Offer: ¥2 Off for Orders Over ¥20 http://e.tb.cn/h.gp8mxdU94VIInpI?tk=tyQa3TwZaDx MF3543 "TTC Kailh Mouse Wheel Encoder 7/8/9/10/11/13MM Razer Viper SENSEI G403G603G703"
Click the link to open directly or search on Taobao to open directly.
PCB file.rar
Software.rar
3D Shell.rar
PDF_ PAW3395 Mouse Based on STM32.zip
Altium_ PAW3395 mouse based on STM32.zip
PADS_ PAW3395 mouse based on STM32.zip
BOM_ PAW3395 Mouse Based on STM32.xlsx
90798
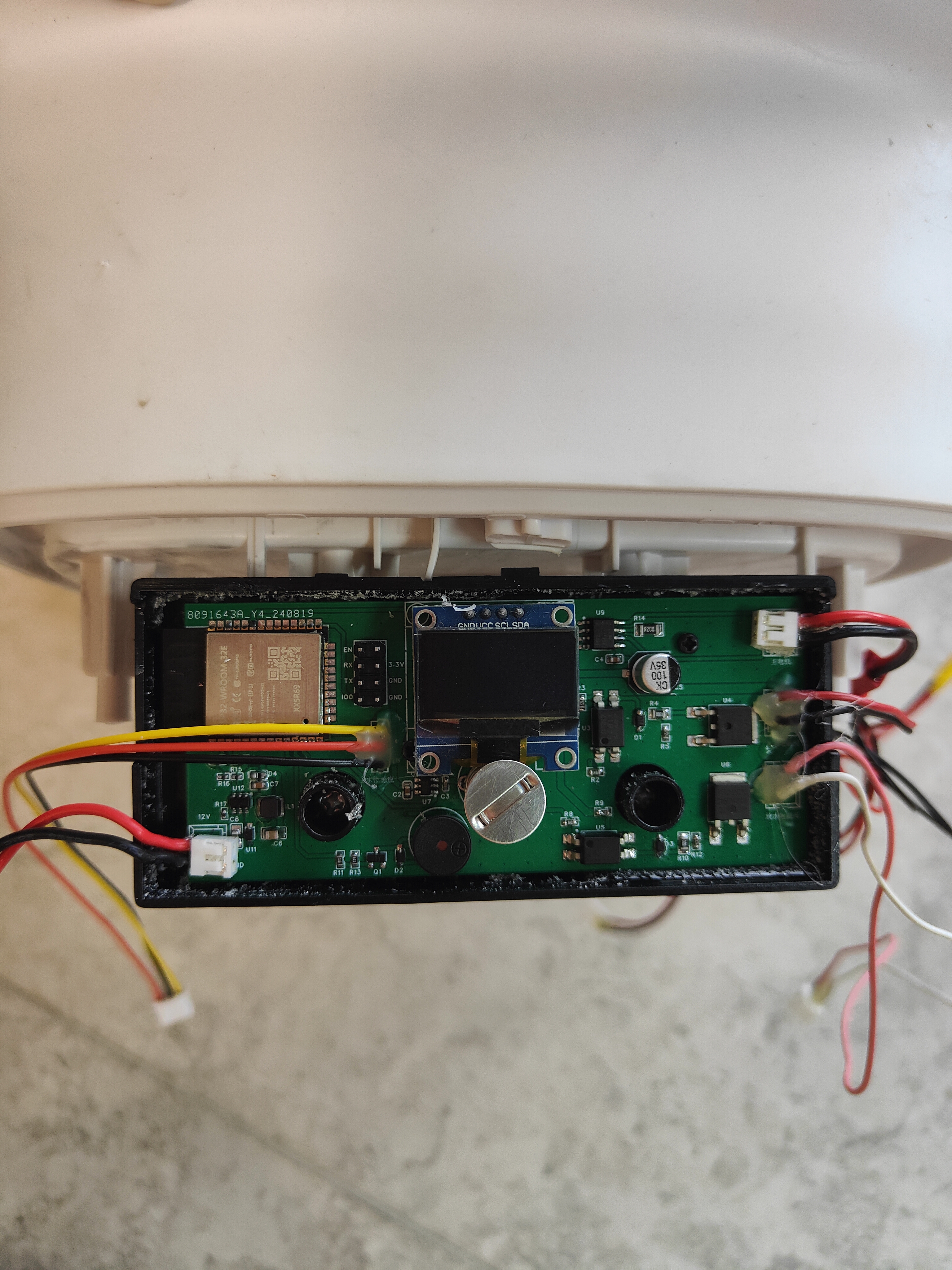
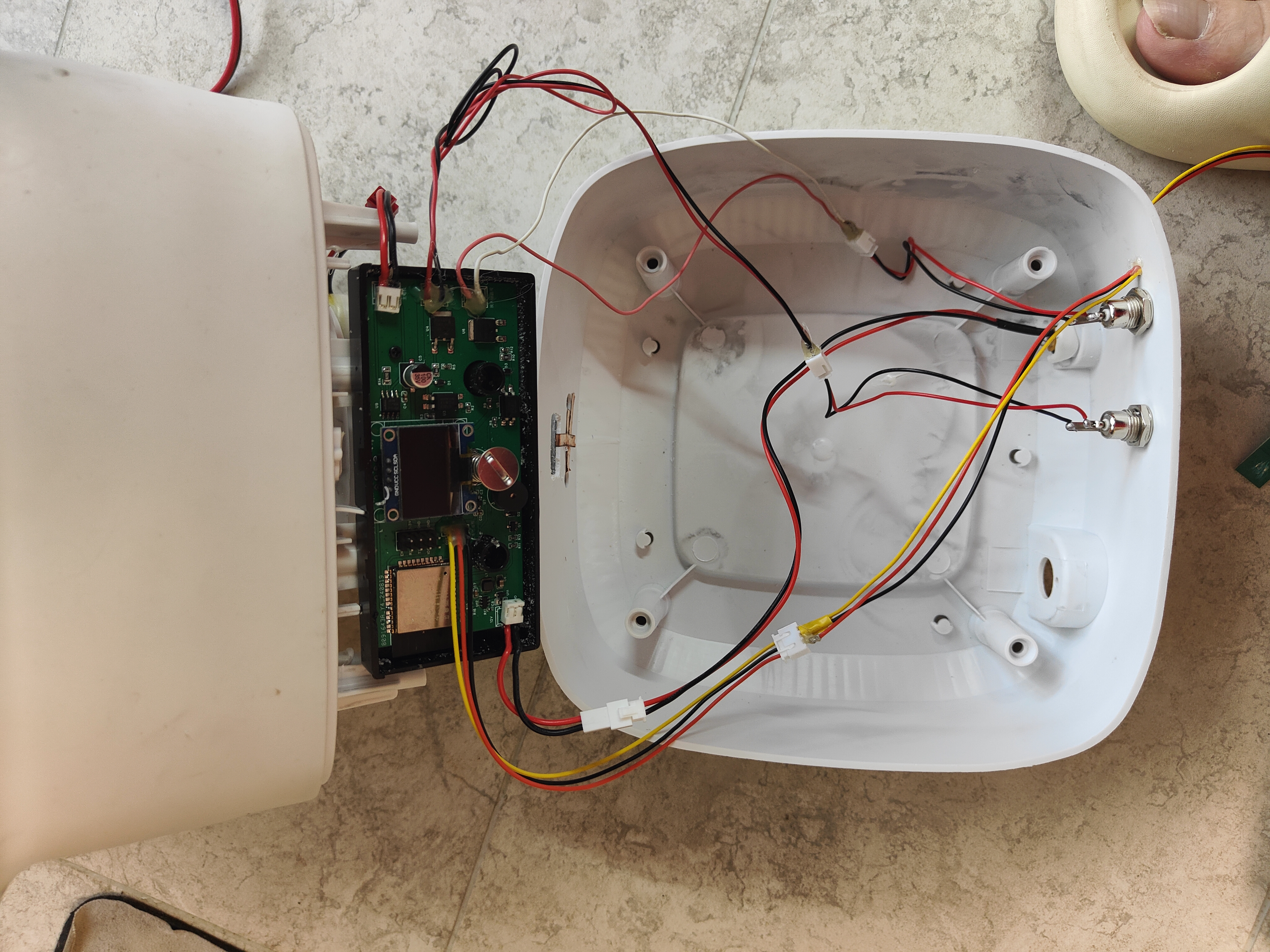
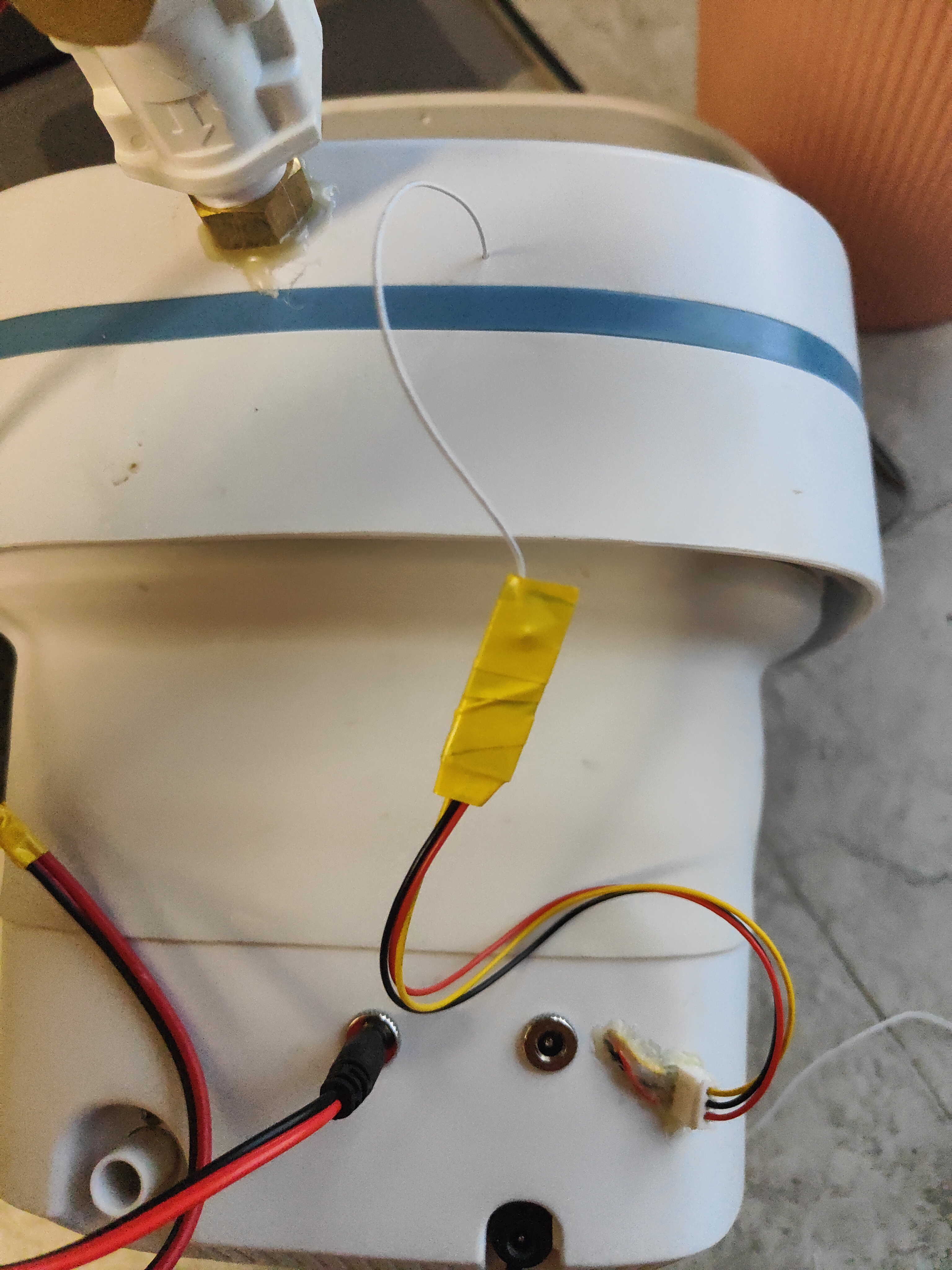
Automatic washing machine based on ESP32
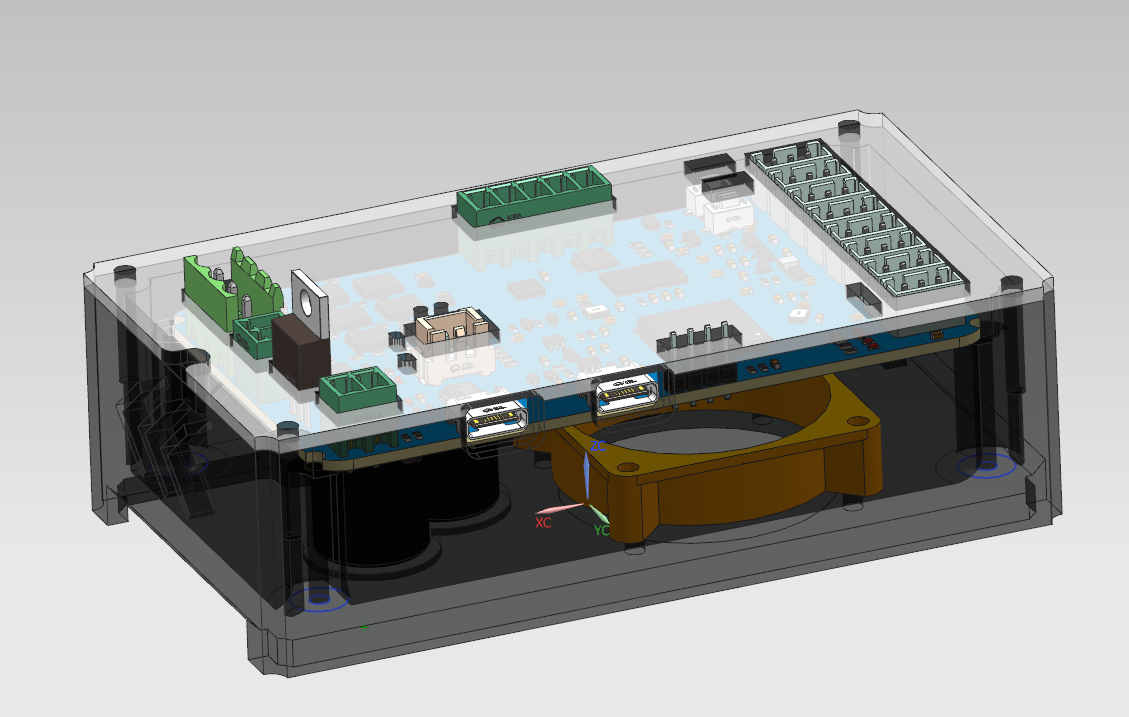
Automatic washing machine based on ESP32, a modified Little Swan manual washing machine
Preface:
I have a manual sock washer that came with my Little Swan washing machine, which I always found cumbersome. I wanted to convert it to automatic, and luckily, JLCPCB and Espressif Systems held a "Design Competition Based on ESP32 IoT," so I signed up.
I'm not an electronics major, nor am I an embedded software developer; I just tinker with various software. Thanks to JLCPCB for supporting newcomers, I've learned a lot, so the code is open source. After modifying
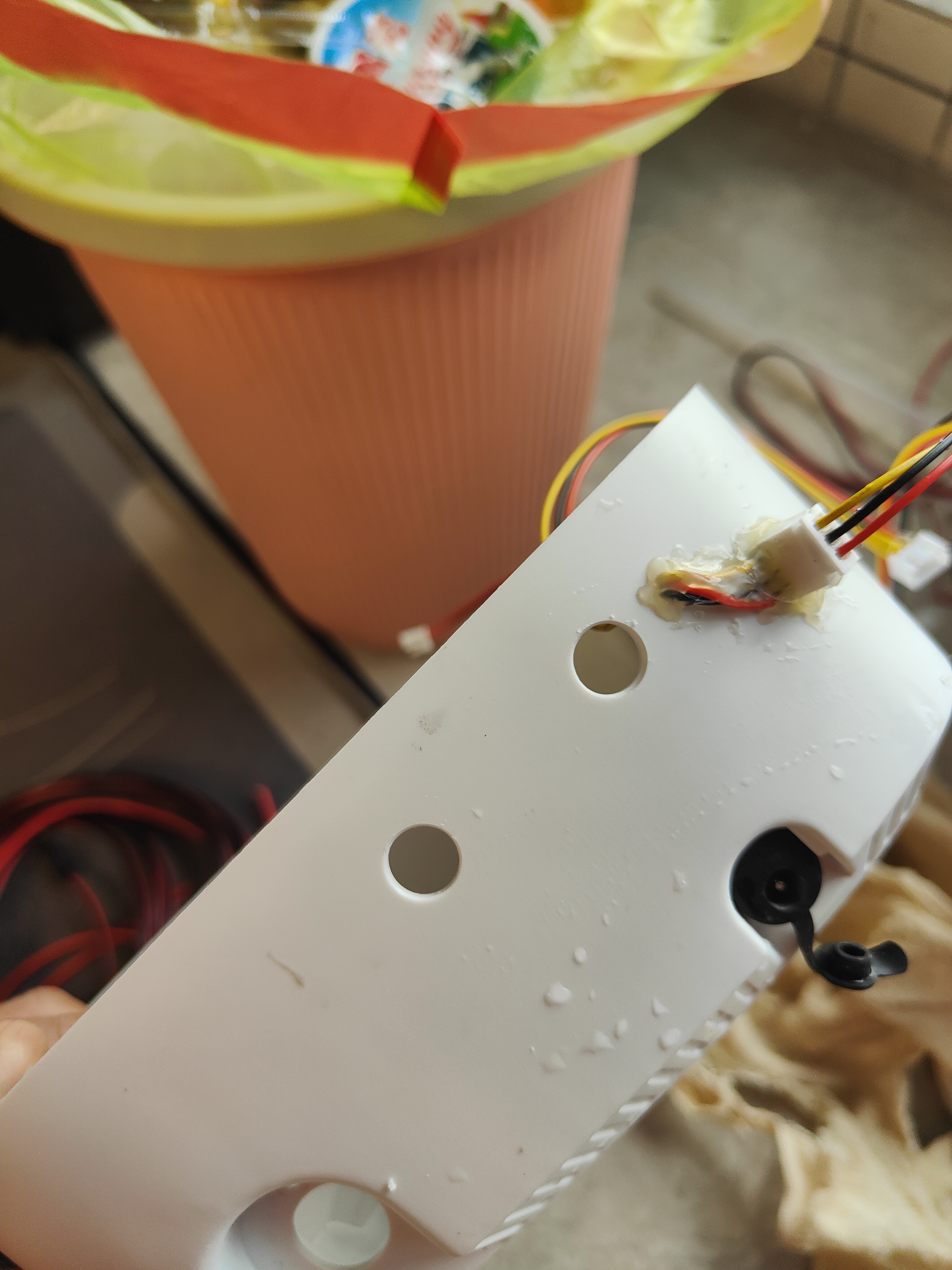
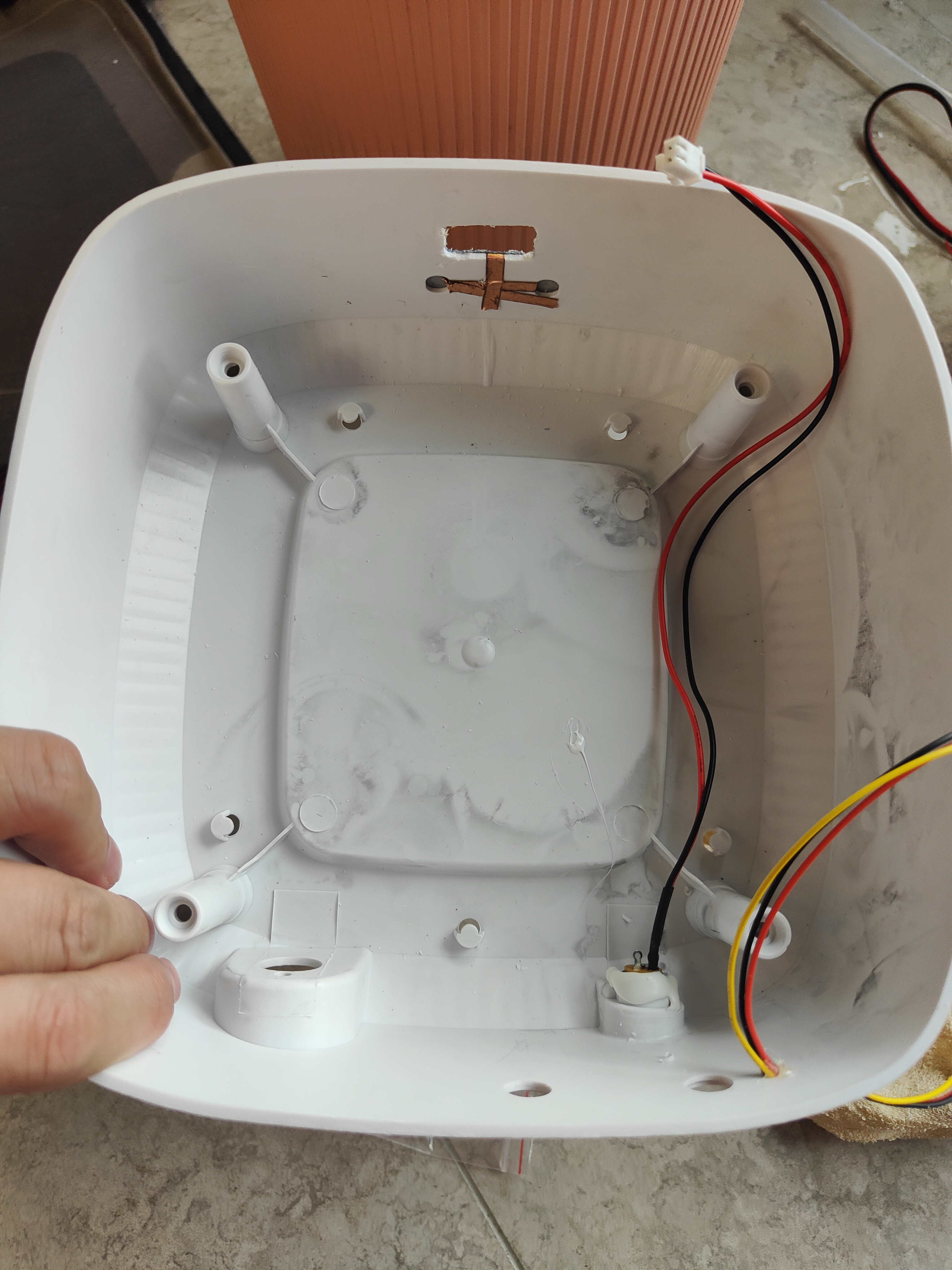
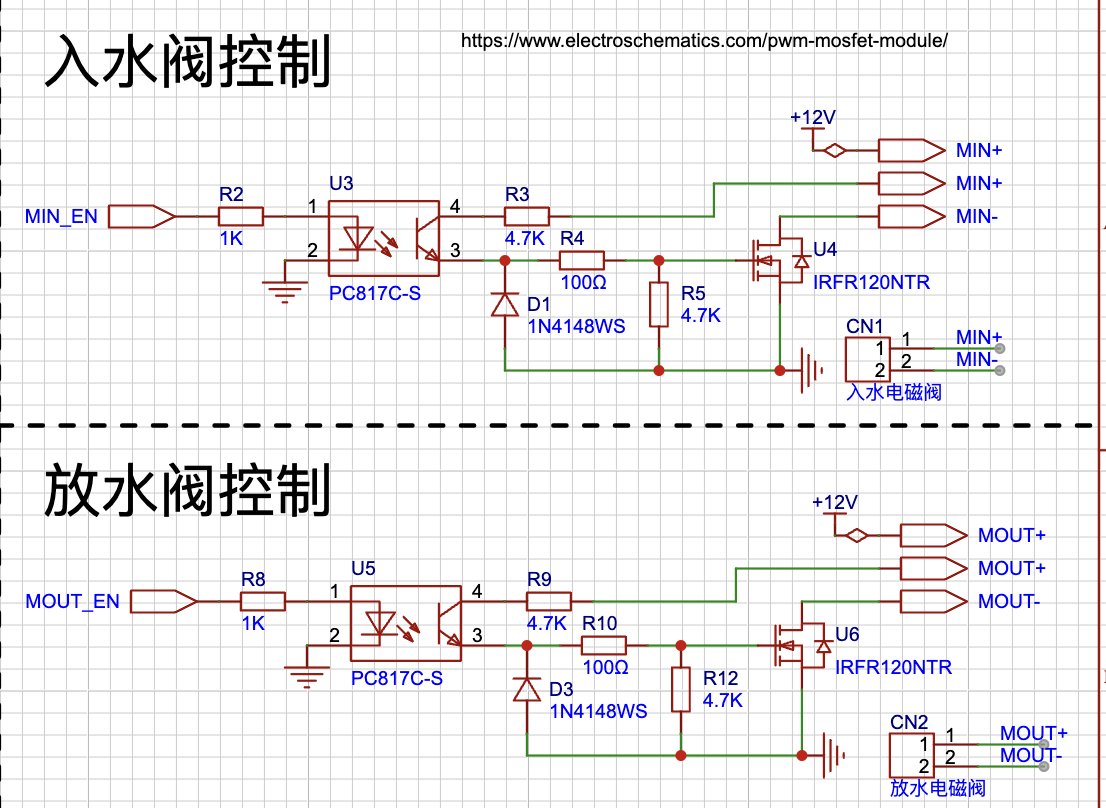
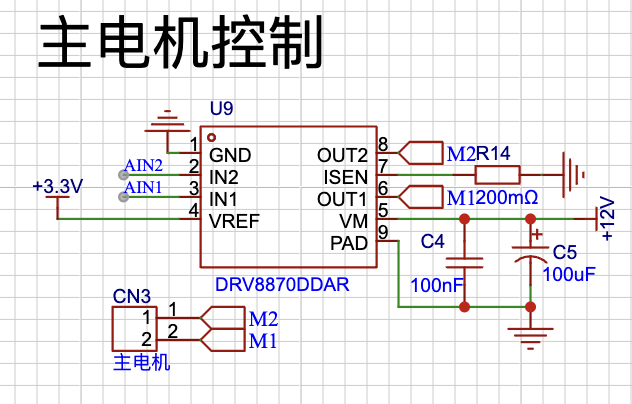
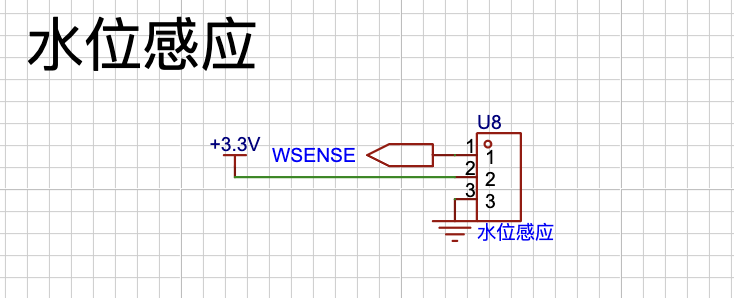
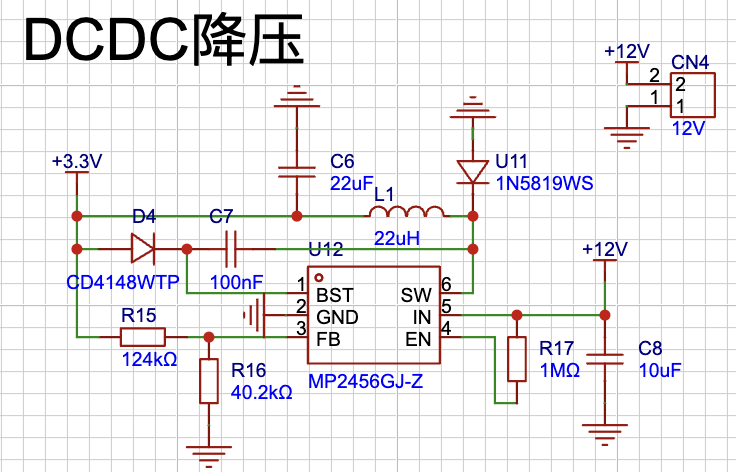
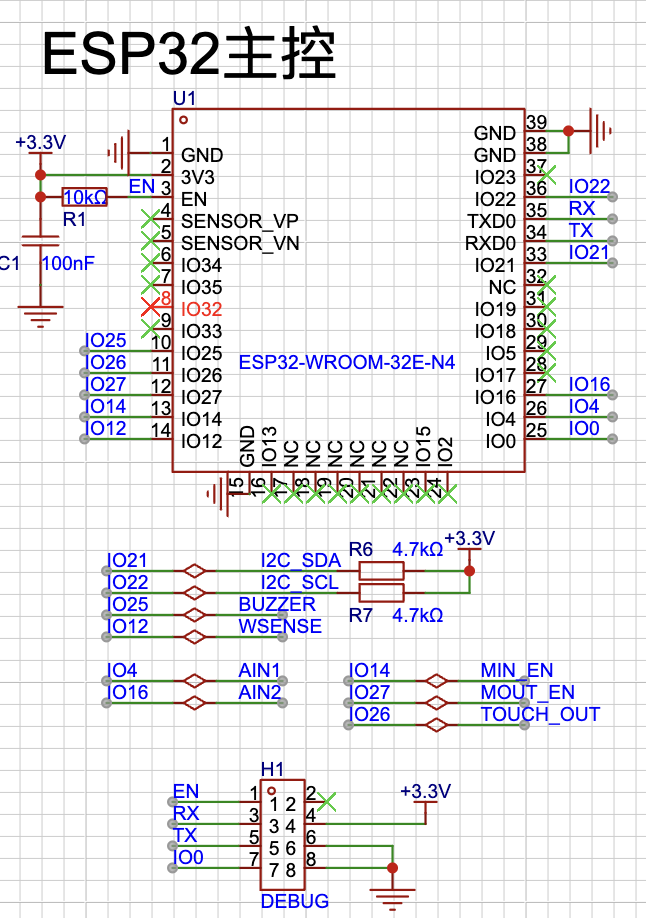
the old machine : For the screen hole, be careful; I accidentally slid the right side too wide. Without comparison, you don't realize how thin the cables I usually buy are for drilling holes for external solenoid valve sockets. I recommend using scissors or something similar to plan the hole; using a drill can easily make the hole too big. The TTP223 touchscreen isn't sensitive enough; you need to use copper foil. Actually, you can use an ESP32 touchscreen directly. For the water level sensor, I bought an M04 water level detection module and wrapped it with electrical tape to avoid false readings. Key improvements: 1. Main motor supports forward and reverse rotation, theoretically resulting in cleaner socks. 2. Supports automatic water inlet and drainage, and spin-drying. 3. Must have an OLED display screen. 4. Maintain the original layout with minimal exterior modifications. 5. Automatically detects water level to avoid water pressure fluctuations and difficulty in controlling water level. 6. Supports buzzer reminders. 7. Must support OTA (Over-The-Air) updates (long press Touch during startup to enter OTA mode). Schematic diagram: Solenoid valve control, directly using the common FR120 control circuit, supports high-power motors . The main motor uses the common H-bridge chip DRV8870 for control, supporting forward and reverse rotation, with a maximum load of 3.6A and a voltage range of 6.5V~45V. For water level control, the mature M04 module is used, which is convenient for external connection. For DC-DC step-down, the MP2456 is still better . The ESP8266 is sufficient for the main controller, but this promotion requires the ESP32, so let's use it. The software uses Arduino + PlatformIO, which is relatively simple. The OLED part directly uses the u8g2 library commonly used for monochrome screens. For details, please refer to the attached source code or visit https://github.com/jecelyin/esp32-washer. Subsequent code updates will be available on GitHub.


demo.mp4
esp32_washer.zip
PDF_ESP32-based Automatic Washing Machine.zip
Altium_ESP32-based Automatic Washing Machine.zip
PADS_ESP32-based Automatic Washing Machine.zip
BOM_ESP32-based Automatic Washing Machine.xlsx
90799
electronic
 Project Functionality :
Project Functionality :  Software code
Software code 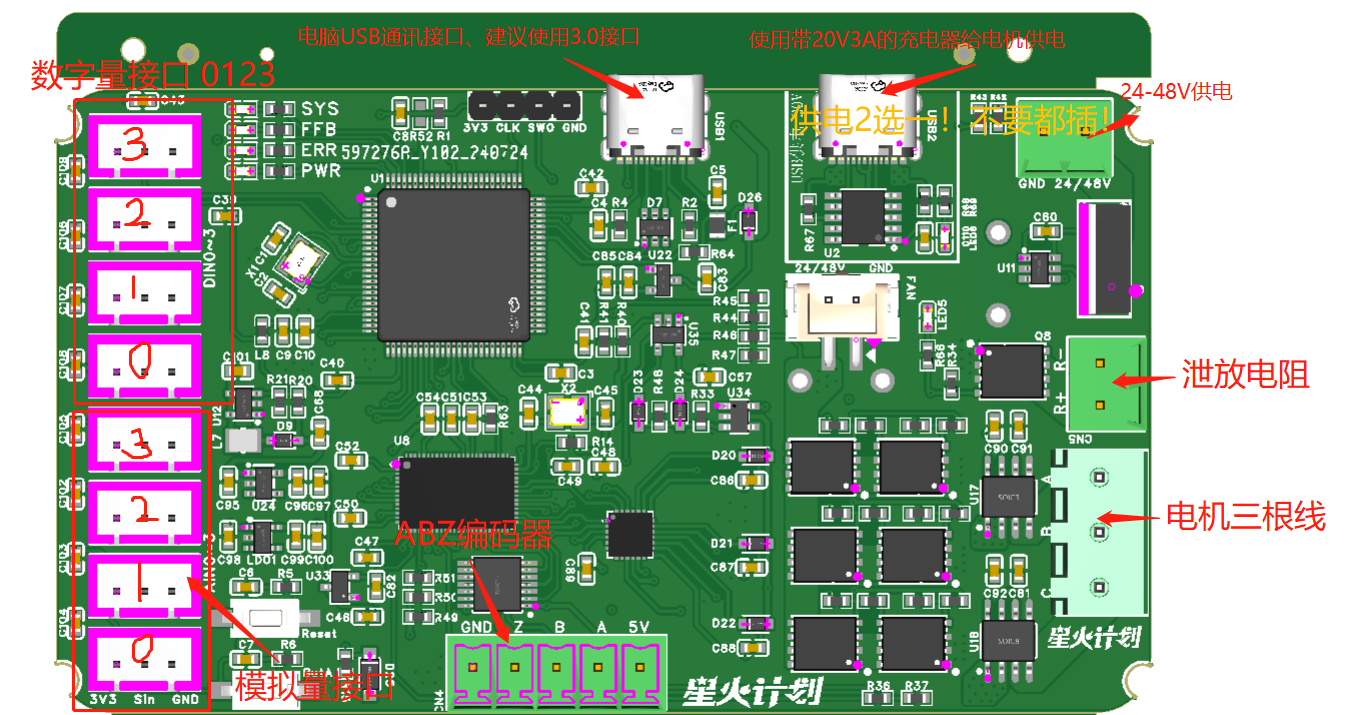 October 26, 2024: Re-uploaded documents, including printouts and some material specifications and purchase methods.
October 26, 2024: Re-uploaded documents, including printouts and some material specifications and purchase methods.
 ESP32-S3 DTU Edge Gateway
ESP32-S3 DTU Edge Gateway 








 京公网安备 11010802033920号
京公网安备 11010802033920号

 HM6116AP-15
HM6116AP-15



