The remote-controlled car based on STM32F103C6T6 and L298N is an intelligent car system integrating modern microcontroller technology and motor drive technology. The following is a detailed introduction to this remote-controlled car:
I. System Overview
1. Core Control Unit
Microcontroller: Utilizing the STM32F103C6T6, this is a low-power, high-performance 32-bit microcontroller based on the ARM Cortex-M3 core. It possesses abundant peripheral resources, such as timers, PWM (Pulse Width Modulation), ADC (Analog-to-Digital Converter), and USART (Universal Synchronous/Asynchronous Receiver/Transmitter), capable of meeting the complex control needs of the remote-controlled car.
2. Motor Drive Module
L298N Driver Chip: This module is a dual full-bridge DC motor driver chip, capable of driving two DC motors or one stepper motor. By controlling different input signals, the L298N can adjust the speed and direction of the motors, thereby achieving flexible movement of the car.
II. Functional Features
1. Remote Control Function
The remote-controlled car is typically remotely controlled via a wireless communication module (such as the NRF24L01). Users can send commands to the car via remote control, and the car will execute the corresponding actions after receiving the commands, such as moving forward, backward, turning left or right.
2. Autonomous Navigation:
Although the primary function is remote control, based on the powerful processing capabilities of the STM32F103C6T6, the car can also integrate autonomous navigation functions such as line following and obstacle avoidance. By detecting black lines or specific paths using line following sensors (such as the TCRT5000), the car can achieve automatic line following.
3. Easy Expansion:
The system design is flexible, and other sensors or modules can be added as needed, such as ultrasonic sensors for obstacle avoidance and Bluetooth modules for wireless data transmission, further enhancing the car's intelligence level.
III. Hardware Components
1. Controller Section:
STM32F103C6T6 microcontroller board,
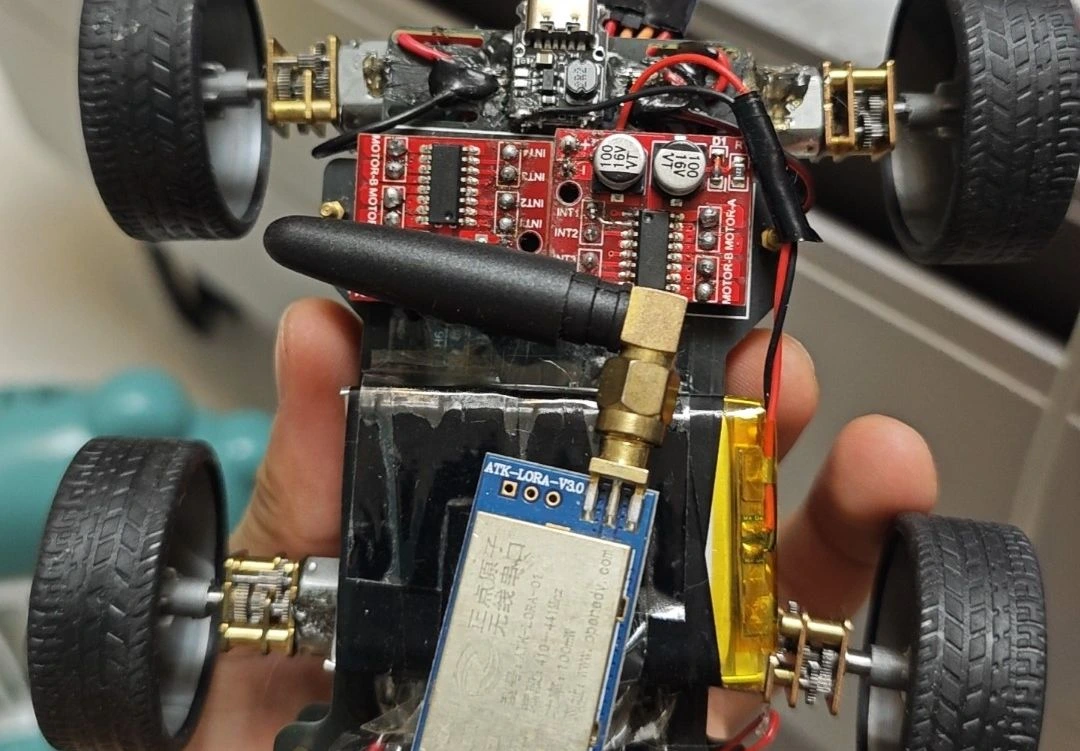
wireless communication module (e.g., LOAR)
2. Drive Section:
L298N motor drive module
, four DC motors (each controlling the left and right wheels of the car)
3. Sensor Section
: Obstacle avoidance sensors (e.g., ultrasonic sensors, optional)
4. Power Supply Section:
Lithium battery (provides power to the car)
, voltage regulator circuit (ensuring a stable voltage supply to each module)
IV. Software Development
1. Programming Language
: Typically C language is used, utilizing the STM32's HAL library or standard peripheral library to simplify the development process.
2. Development Environment
: Integrated development environments such as Keil MDK and IAR EWARM can be used for program writing, compilation, and debugging.
3. Program Structure:
The program typically includes an initialization section (e.g., system clock, GPIO, PWM, interrupt initialization), a main loop section (for handling remote control commands, sensor data, etc.), and an interrupt service routine (for handling timer overflows, external interrupts, etc.).








 京公网安备 11010802033920号
京公网安备 11010802033920号

 HJL26060C
HJL26060C



