Common robotic arm controls are developed from CNC, emphasizing constant speed and stability in the motion process. Many controllers use hybrid PID for speed control, which generates great acceleration during the startup phase in order to quickly reach the set speed. Due to the solid state of the solid itself Stiffness, this drastic speed change is very effective for CNC machining scenarios or general solid handling scenarios. However, it will have a huge impact in liquid handling scenarios, so new control methods need to be proposed. This control method must have high requirements on acceleration. In order to quantify this acceleration performance, a device for testing the stability of the end motion of the robotic arm is required.
The desktop manipulator used to verify the algorithm is a small manipulator, so the end acceleration measurement device must be lightweight and small. In addition, in order to avoid the influence of cables on movement, the measurement device must have an independent power supply system and transmit data wirelessly. SensorTile.box perfectly meets this requirement. You only need to upload the read data to the host computer to analyze the data, including drawing real-time waveforms, maximum value analysis, etc.
Complete design description: http://bbs.eeworld.com.cn/thread-1130941-1-1.html

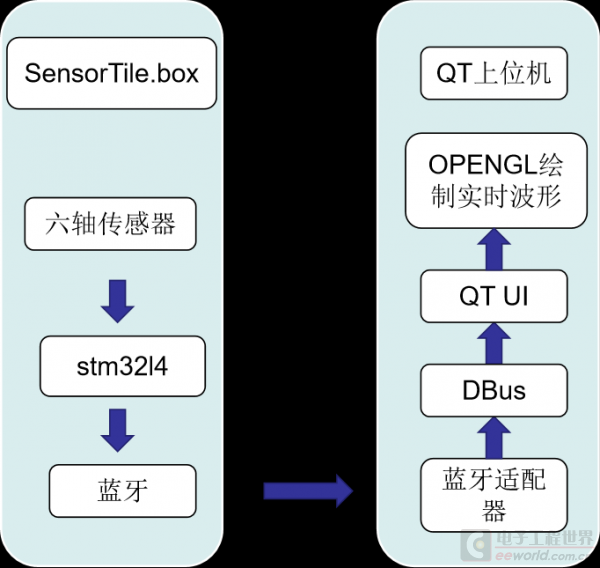
Blockdiagram
All reference designs on this site are sourced from major semiconductor manufacturers or collected online for learning and research. The copyright belongs to the semiconductor manufacturer or the original author. If you believe that the reference design of this site infringes upon your relevant rights and interests, please send us a rights notice. As a neutral platform service provider, we will take measures to delete the relevant content in accordance with relevant laws after receiving the relevant notice from the rights holder. Please send relevant notifications to email: bbs_service@eeworld.com.cn.
It is your responsibility to test the circuit yourself and determine its suitability for you. EEWorld will not be liable for direct, indirect, special, incidental, consequential or punitive damages arising from any cause or anything connected to any reference design used.
Supported by EEWorld Datasheet
EEWorld
subscription
account

EEWorld
service
account

Automotive
development
community

Robot
development
community

About Us Customer Service Contact Information Datasheet Sitemap LatestNews



Room 1530, 15th Floor, Building B,
No.18 Zhongguancun Street,
Haidian District,
Beijing, Postal Code: 100190
China
Telephone: 008610 8235 0740
 京公网安备 11010802033920号
京公网安备 11010802033920号

 AT5FC008
AT5FC008



