Project Overview:
This project is a course design car based on the Liangshan School of LCSC, which includes functions such as Bluetooth tracking and obstacle avoidance.
The system
features two LED lights, one on each side, to simulate the headlight status of a vehicle passing by.
It has two independent buttons, KEYS and KEYM, for starting and switching between driving and driving modes.
A buzzer is included to sound an alarm when encountering obstacles and can also play music by changing its output frequency using a timer.
It is equipped with four motor drivers and four N20 motors, enabling PWM output and speed control.
An HCSR04 ultrasonic module interface circuit is provided, allowing for ultrasonic obstacle avoidance by learning the module's principles and underlying driver code.
An HC-05 Bluetooth module interface circuit is also provided, enabling wireless remote control of the car via a mobile Bluetooth app.
The
power supply circuit uses two 7.4V lithium batteries to power the system, which is then stepped down to 5V by a step-down chip to power the microcontroller. The LCSC Liangshanpai core board connects to the LED lights, button circuits, obstacle avoidance circuits, tracking circuits, Bluetooth remote control circuits (for wireless remote control), buzzer, and motor drive circuits on the smart car expansion board.
Principle Analysis (Hardware Description)
1. The principle of line following is based on detecting black lines: An infrared emitter emits light to the ground. When the infrared light encounters a white surface, it is reflected. The infrared receiver receives the reflected light, and after passing through a Schmitt trigger, it outputs a low level. Therefore, the movement on the black line can be determined by reading the I/O port levels of the left and right line following.
2. The basic principle of ultrasonic following
: An ultrasonic sensor (not a transceiver) is installed at each end of the vehicle, and a person holds an ultrasonic module. The distances from the left and right sides to the person form a triangle.
When the vehicle is facing the person, the distance between the two ultrasonic modules on the vehicle is A=B.
When the person turns left, A is always less than B; similarly, when the person turns right, A is always greater than B.
When the person walks forward, the distance between A and B is always greater than the set distance. We only need to control these distances.
3. The TXD and RXD of the Bluetooth module must be connected to the RXD and TXD of the microcontroller respectively for normal serial communication. Then, the serial port is configured in the software. The switch function is used to process the data received by Bluetooth and execute the corresponding movement.
4. Power Supply Circuit: The power supply is a battery holder that connects two 3.7V lithium batteries to power the vehicle. After the power comes in, it passes through an ME6210A50PG step-down chip. This chip has a maximum input voltage of 18V and can output a fixed 5V voltage to power the microcontroller and peripheral devices. The motor drive chip is directly powered by a 7.4V battery. It also includes a Schottky diode (SS34) to prevent reverse polarity connection of the power input, providing protection. A 100uF capacitor is also added for buffering and filtering.
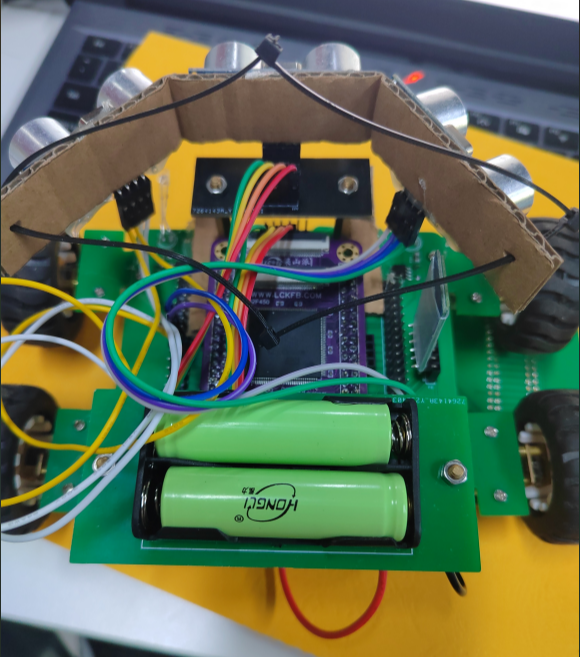
The assembly instructions
emphasize DIY, so all modules are separated. For specific assembly, refer to the assembly diagram.
Connect the motor and battery box using M3 screws and studs. The stacking method maximizes the vehicle's application without excessively increasing its size, and all modules can be custom-made free of charge.
Software code is attached. Video link:
see attachment.








 京公网安备 11010802033920号
京公网安备 11010802033920号

 103-332KF
103-332KF



