Project Description:
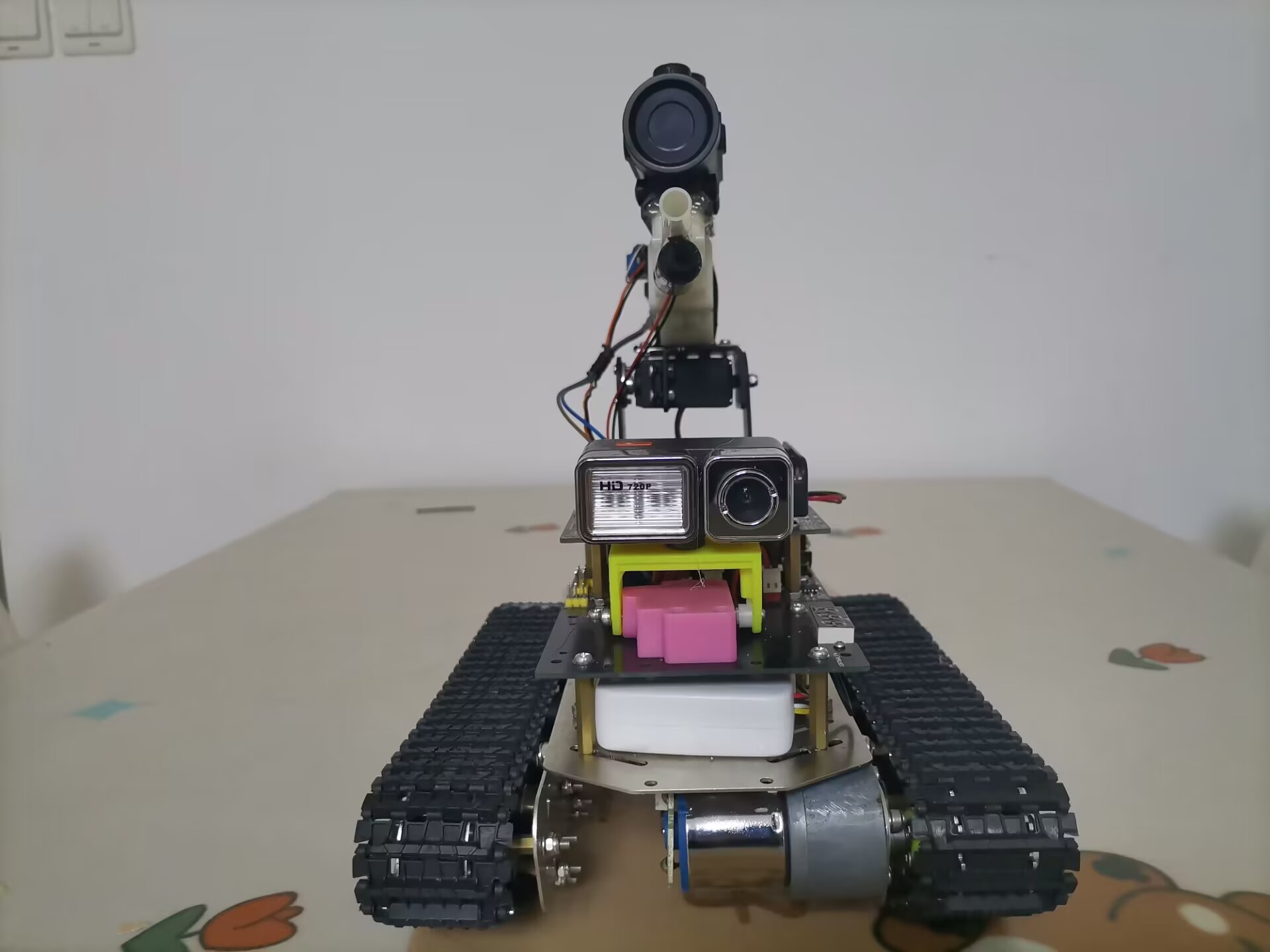
The tracked vehicle chassis, wireless router, HD camera, and water gun assembly in this project are off-the-shelf components. Other components, including the main control board, rotating gimbal expansion board, and rotating gimbal itself, are all custom-designed.
Project Functions
: 1. Tracked chassis with two geared motors for power, offering good overall load-bearing capacity, climbing ability, and passability.
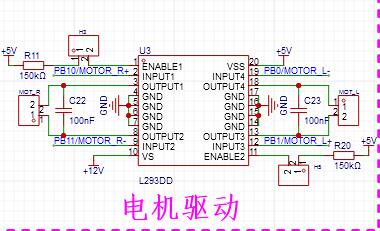
2. Uses an L293D motor drive, allowing for PWM control of motor forward/reverse rotation and speed adjustment.
3. Can be controlled via a mobile app for forward, backward, left, and right turns of the tracked vehicle. It can also control the servo motor, water gun firing, chassis lights, and infrared laser activation/deactivation. The app displays real-time footage from the tracked vehicle's camera.
4. The tracked vehicle's camera is connected to the chassis via a servo motor for pitch control.
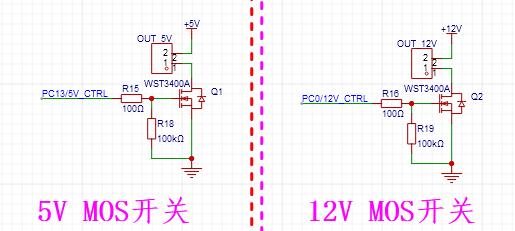
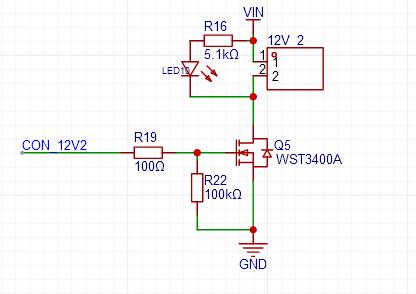
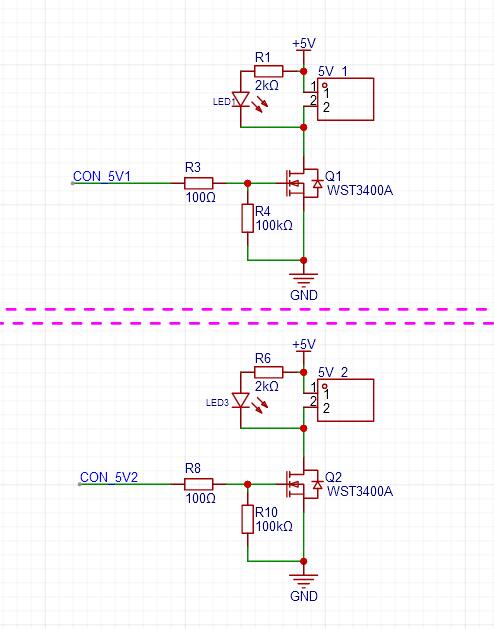
5. The main control board has two power supplies controlled by MOSFETs: one 5V and one 12V (input voltage). In this project, 5V powers the infrared laser head, and 12V powers the LED strip, which can be controlled to turn on or off via a mobile app.
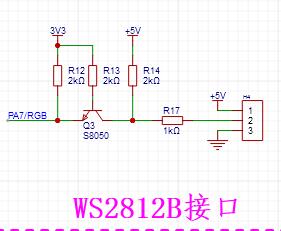
6. It includes a 3.3V to 5V level conversion circuit to drive the WS2812B LED strip.
7. An NRF2401 module interface is reserved for future remote control of the tracked vehicle. 8.
An ultrasonic interface is reserved for future installation of an ultrasonic module.
9. Four servo motor interfaces are reserved; only two are used in this project: one controls the camera's pitch, and the other controls the water gun's pitch.
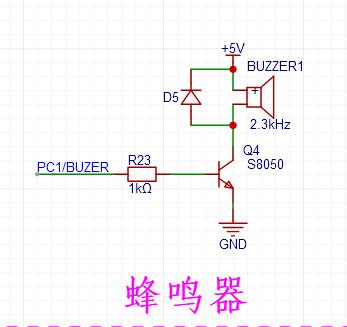
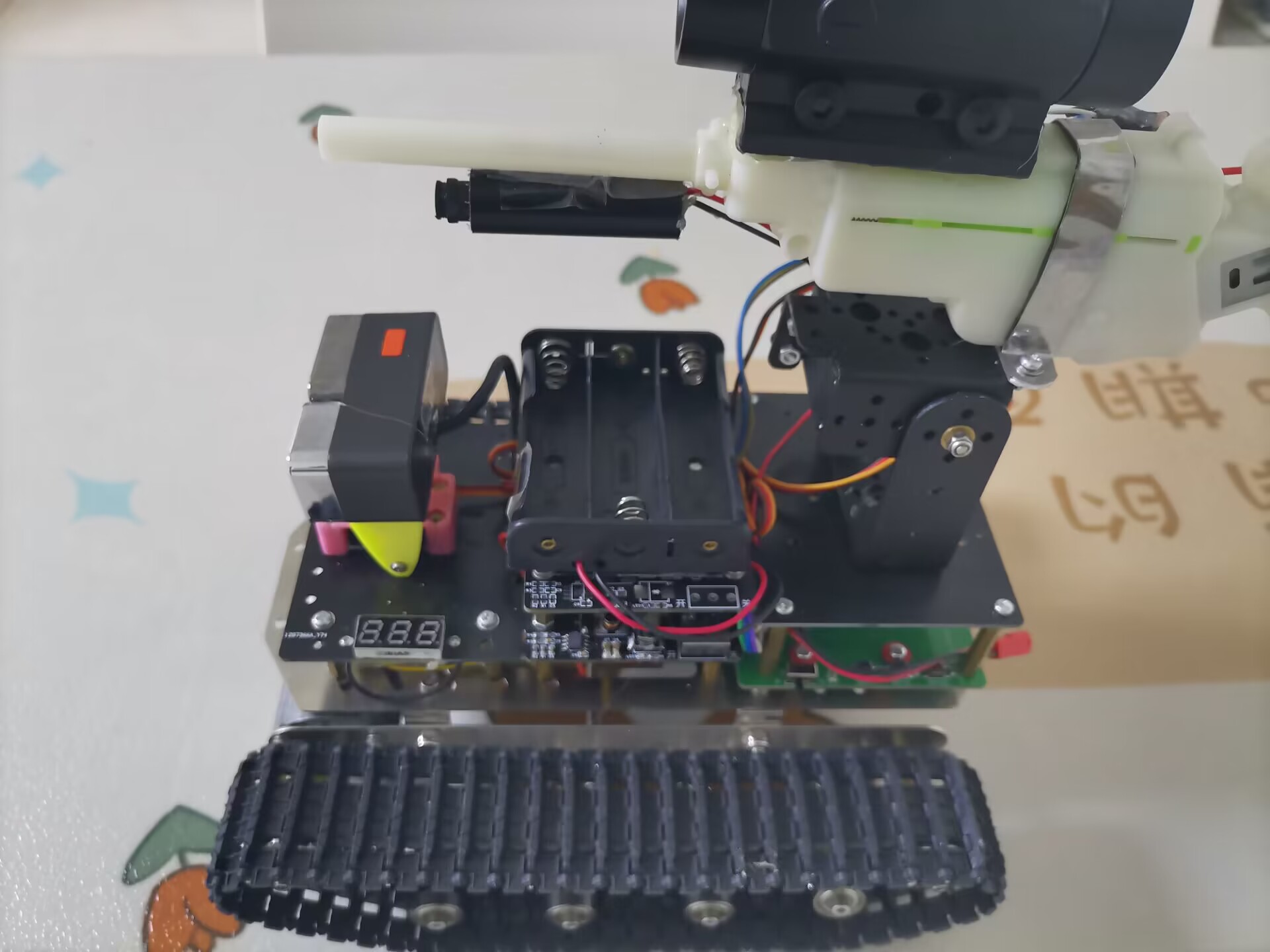
10. The main control board includes a buzzer circuit for alarm sounds and low voltage alarms.
11. A water gun assembly is installed on the vehicle body, capable of firing water bullets. Pitch is controlled by an MG996 servo motor, and azimuth follows the vehicle's rotation. The water gun is powered by a separate 2S lithium battery and controlled by a MOS switch; a double-tap on the mobile app screen fires one water bullet.
12. An infrared laser head is installed under the barrel of the water gun. The laser head module and the 3.3V voltage regulator module are encapsulated in a cylindrical tube, requiring only 5V power.
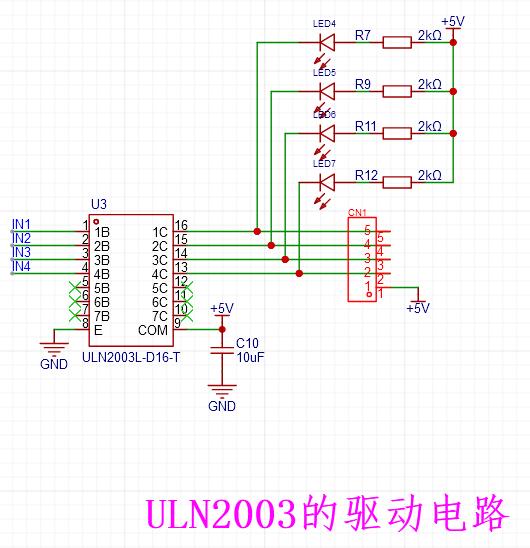
13. A rotating gimbal expansion board has been added. This circuit is powered by a separate 2S lithium battery and has a reserved control interface for connection to the main control board. The circuit includes a DC-DC 5V step-down circuit, an LDO 3.3V voltage regulator circuit, a 6-channel MOS-controlled power output circuit (2 channels 3.3V, 2 channels 5V, 2 channels VIN), a ULN2003 driver circuit (used to drive a 28-stepper motor), and 3 push-button switches.
14. The stepper motor rotating gimbal uses a 28-stepper motor, connected to the rotating part of the gimbal via a hollow turntable bearing. It can be fitted with a water gun or other character equipment. The physical component is now complete and has undergone power-on testing. 360-degree rotation is smooth. The only remaining issue is a misalignment between the motor shaft and the upper part of the gimbal. This is because the fixing screws are obstructed by the bearing, preventing a tight fit and affecting the accuracy of the water gun firing. Therefore, this gimbal will not be installed for now; this issue will be addressed later.
Design Principles
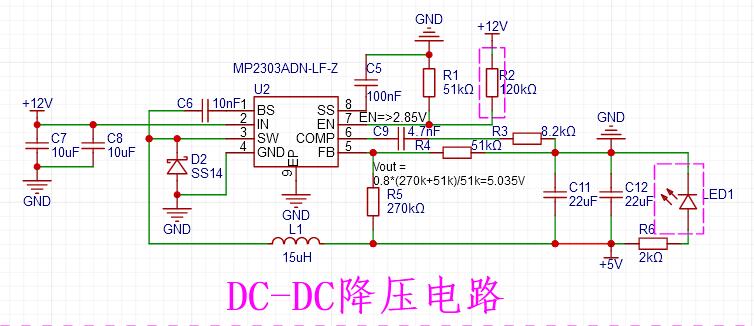
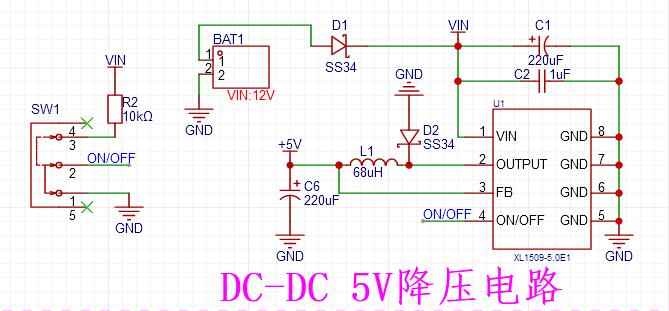
: 1. The system's voltage regulator circuit uses a DC-DC step-down circuit with an input voltage range of 4.7V to 28V (this project uses three 18650 batteries for power). The maximum output current is 3A, and in this project, the output voltage is 5V to power the entire system.
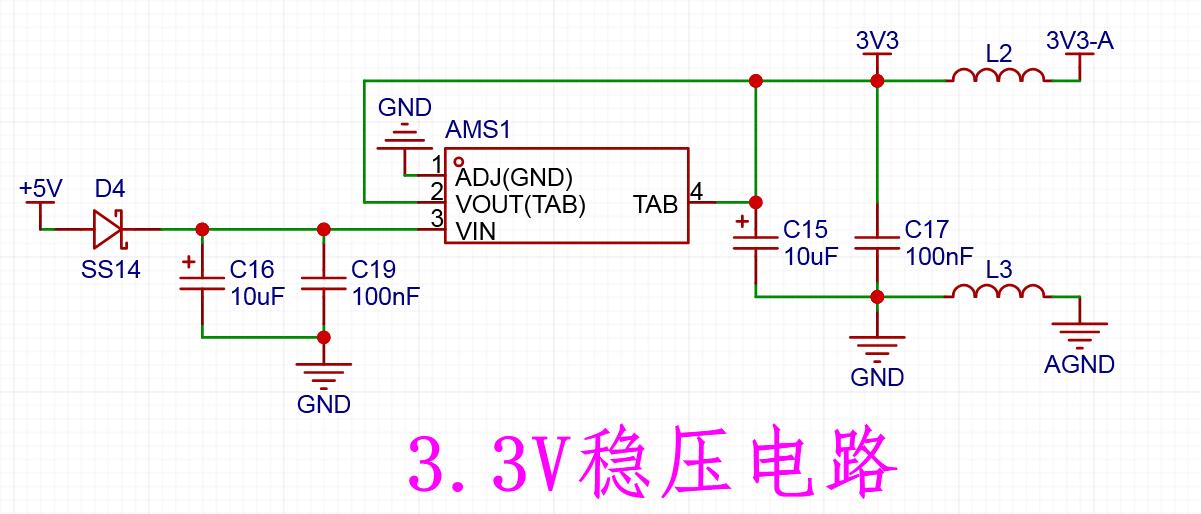
2. The LDO voltage regulator circuit uses an AMS1117-3.3, primarily for powering the microcontroller and some low-power peripherals.
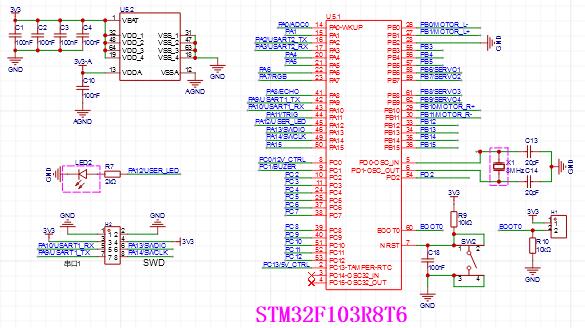
3. The main controller uses an STM32F103R8T6, mainly due to its numerous pins and readily available online resources, facilitating development.
4. An L293D is used as the motor driver, with wide voltage input/output and PWM speed control.
5. Level conversion circuit.
6. Two power supplies controlled by MOS.
7. Buzzer Driver Circuit.
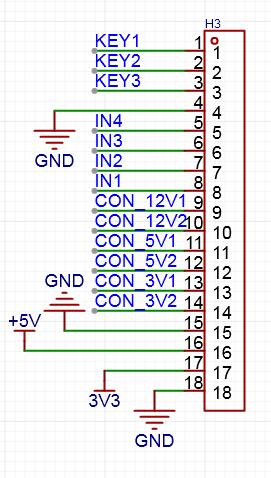
Below is the circuit diagram for the rotating gimbal expansion board
: 1. Also a DC-DC step-down circuit, default output 5V.
2. MOS-controlled power output circuit, output voltage VIN, one for low-power output, one for high-power output.
3. MOS-controlled power output circuit, output voltage is divided into 3.3V and 5V, two of each.
4. Stepper motor driver circuit, using ULN2003L as the driver chip, can drive a common 28 stepper motor.
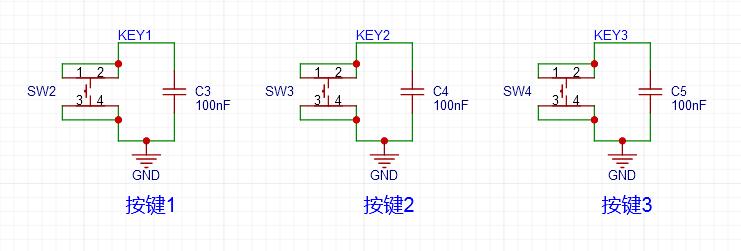
5. Three push-button switches have been added to expand some functions that require setting or start/stop.
6. Wiring terminals for the expansion board. Connect to the main control board using DuPont wires as needed.
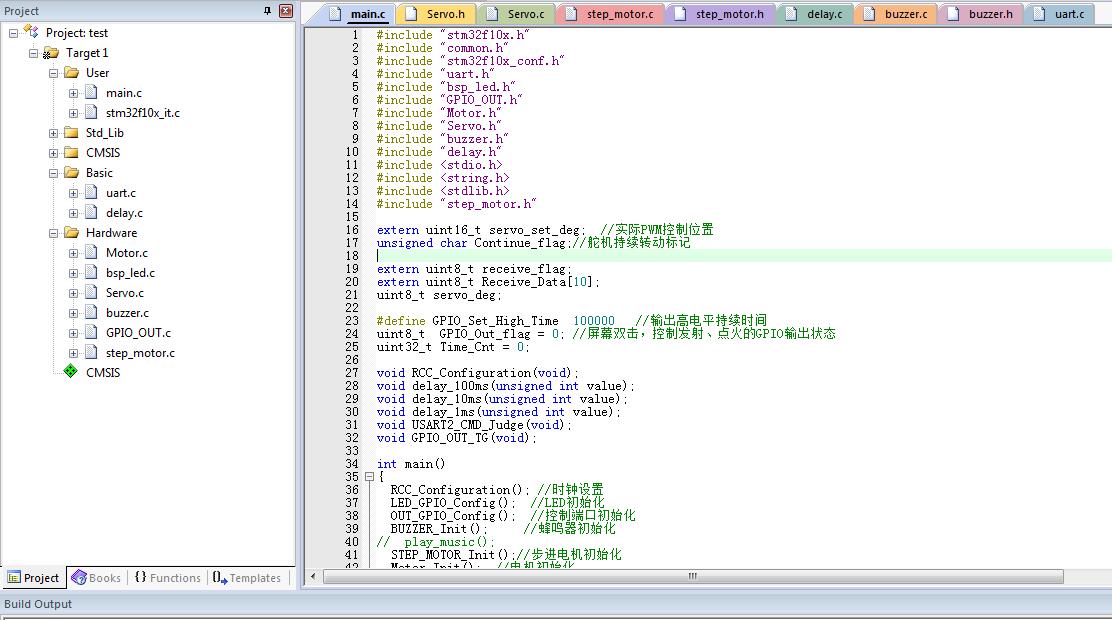
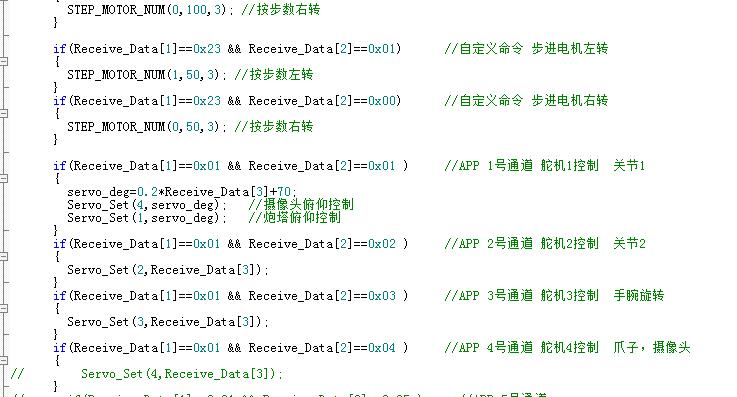
Software Description:
1. The program
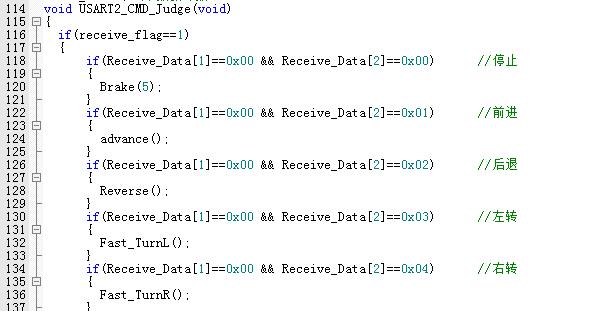
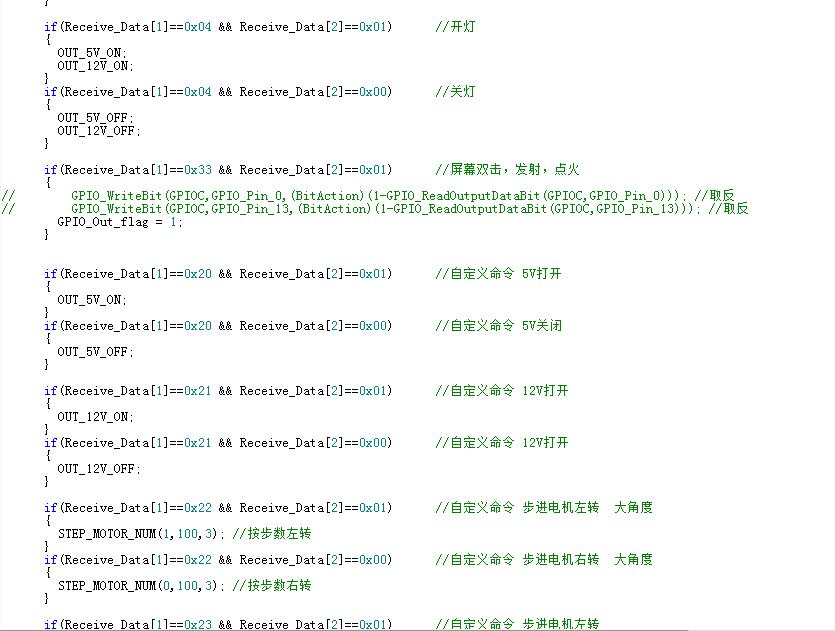
is developed using KEIL software. It mainly receives data from the wireless router's serial port and parses it, performing corresponding actions based on the parsed commands. Only a portion of the content is shown here.
The program is attached; please download it.
2.
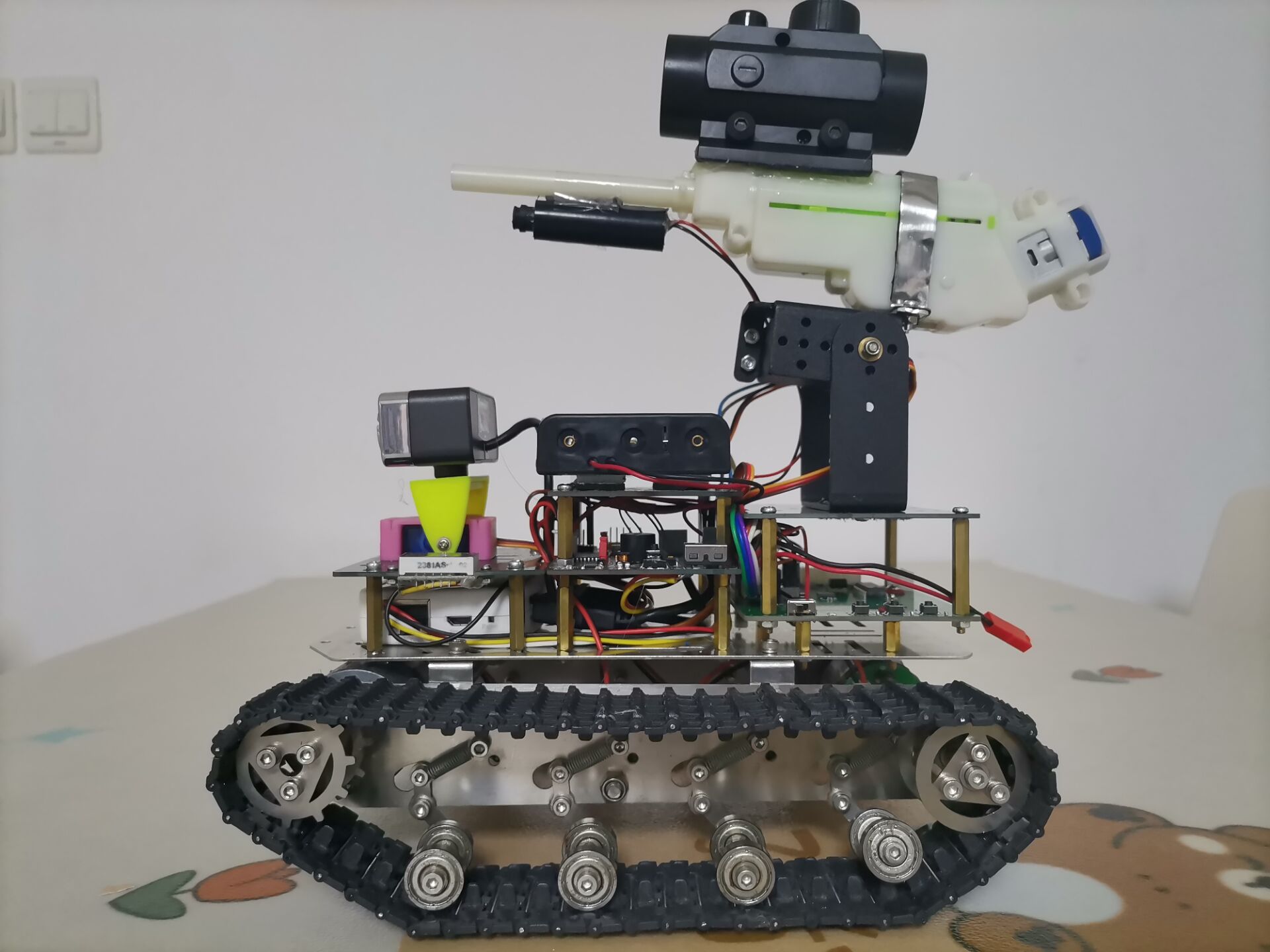
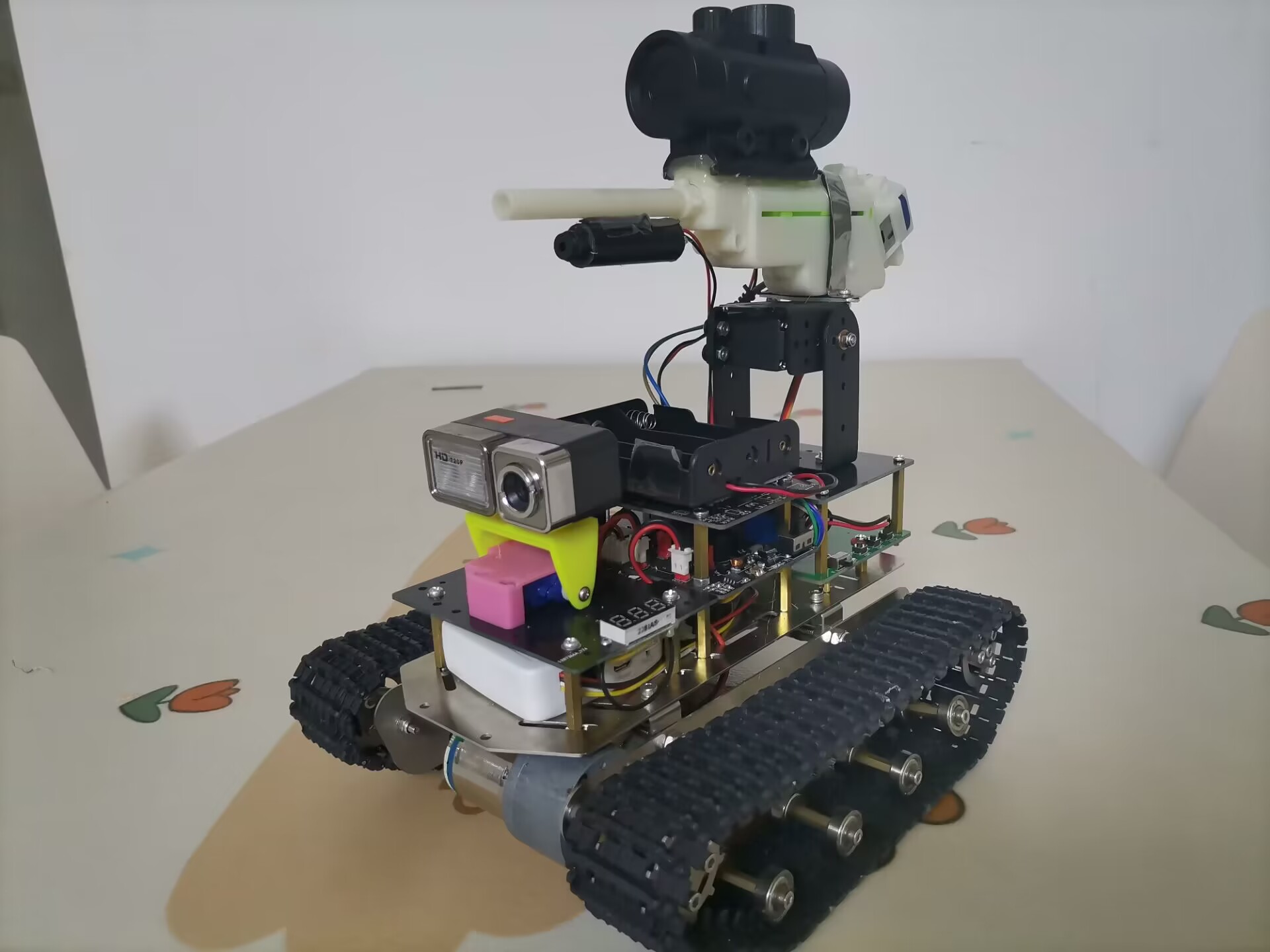
Due to limited capabilities, I directly used an existing app. Search for "wifirobot" online, or download it from this link: https://www.muzhijita.com/apk-fk-5020.html. Here are some additional photos of the rotating gimbal for
physical demonstration. Design Notes: 1. The water gun should not be fired at people, and the water bullets should not be given to children to play with, to avoid accidental ingestion. 2. Do not use infrared lasers to shine into people's eyes, to avoid injury. Other points to note: The tracked vehicle chassis, including the wireless router and camera, were purchased secondhand from Xianyu (a second-hand marketplace). The corresponding products are no longer available online, so I do not recommend that users replicate them. Additionally, this project uses the Xiaor Technology wifirobot app. Due to potential copyright issues, only the relevant webpage link is provided here; the app software is not provided. I suggest that users with the capability develop their own apps.









 京公网安备 11010802033920号
京公网安备 11010802033920号

 JHB12864DSGTCBMUA
JHB12864DSGTCBMUA



