I. Product Introduction This
is a drone controller based on the STM32F722RET6 microcontroller.
This module is the flight control board and can be used with various electrical systems to achieve low-cost drone operation.
II. Application Scenarios
Primarily used for small quadcopter drones; suitable for X8 racing drones.
III. Product Overview
This low-cost F722 drone controller
uses the high-performance STM32F722RET6 (216MHz) microcontroller from the STM32F7 series. It can be configured to 240MHz via the CLI interface
and employs a dual IMU design (dual ICM42688P) for stable flight. This makes flight more stable and control more precise, allowing for easy control whether in racing or free flight at full speed. It also supports replacement with an LGA-14 packaged gyroscope.
Built-in 5V/4A and 9V/4A BEC provide stable and reliable power to external peripherals such as GPS, optical flow meter, receiver, magnetometer, and image transmission devices.
Dual LDOs (SP6205 @500mA), one of which provides dedicated power to the IMU for more stable gyroscope operation. It also supports replacement with SOT-23-5 packaged LDOs. The SPX3819's
built-in OSD module is recommended, allowing real-time display of aircraft data on the video transmission interface for easier pilot control.
An integrated DPS-310 high-performance barometer provides real-time altitude sensing.
Onboard SBUS inverter and active buzzer driver are included.
Multiple interfaces are provided for easy connection to various peripherals. UART: 7 channels (1, 2, 4, 5, 6) SBUS: 1 channel (RX3) I2C: 1 channel PWM: 8 channels USB: (Type-C)
IV. Product Parameters
Main Controller (MCU): STM32F722RET6
Gyroscope (IMU)
: ICM42688P+ICM42688P (SPI1) Character Overlay (OSD
): AT7456E (SPI2) Barometer: DPS-310 (I2C1
) Black Box: W25Q128JVPIQ (SPI3)
Input Voltage: 3-10S (10-44V)
Output Voltage: BEC-9V-4A (LC Filter) BEC-5V-4A
Buzzer: Supports 5V active buzzer
Supported Firmware: INAV Betaflight
Dimensions: 38.5mm x 38.5mm,
Hole Spacing: 30.5mm x 30.5mm,
USB Type: TYPE-C,
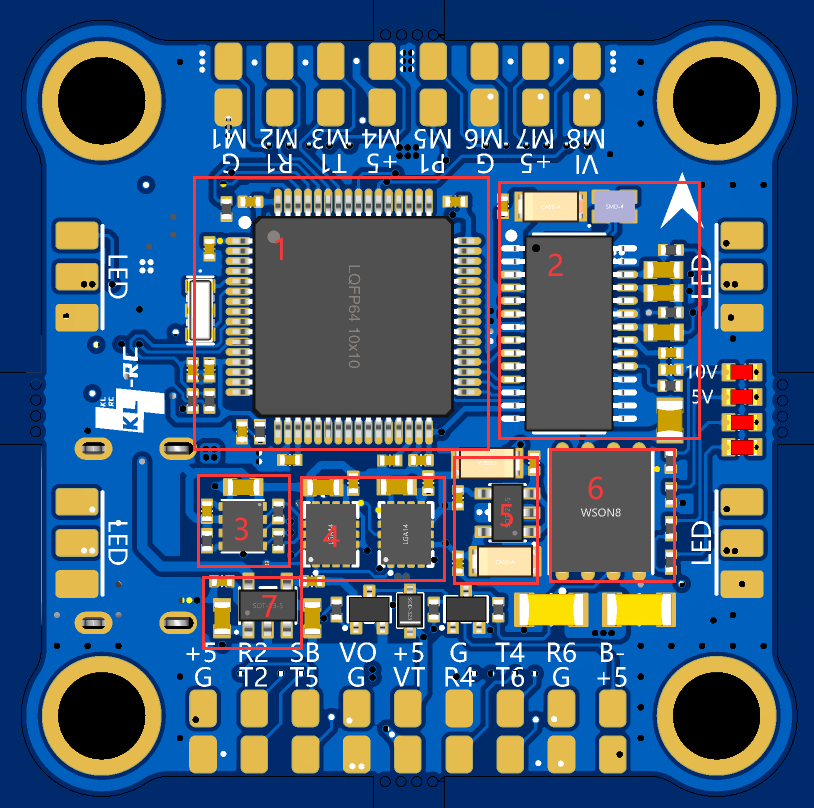
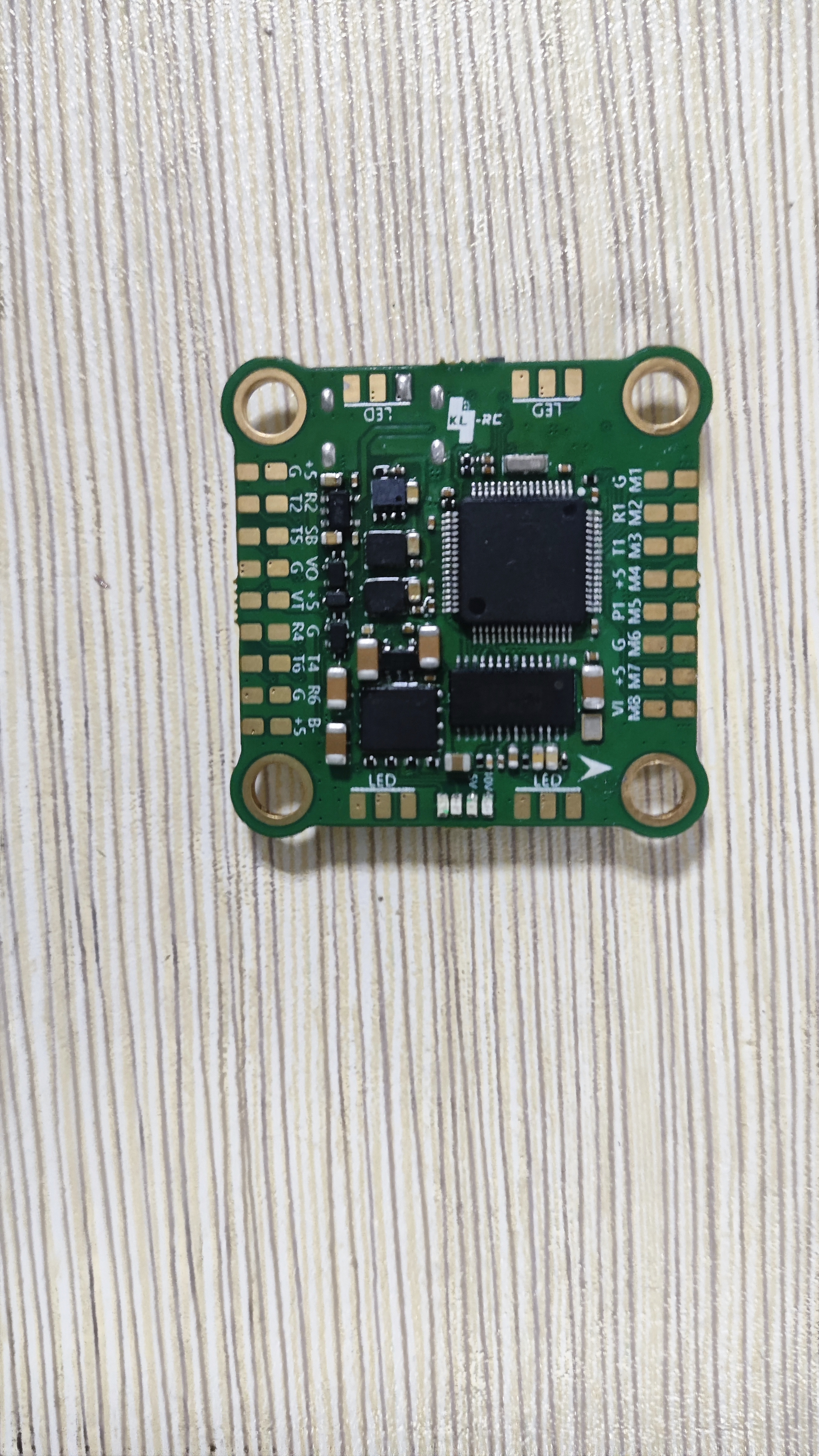
STM32F722RET6 microcontroller,
AT7456E OSD overlay chip,
DPS310 barometer ,
dual ICM42688P gyroscope
sensor, independent power supply,
128M black box
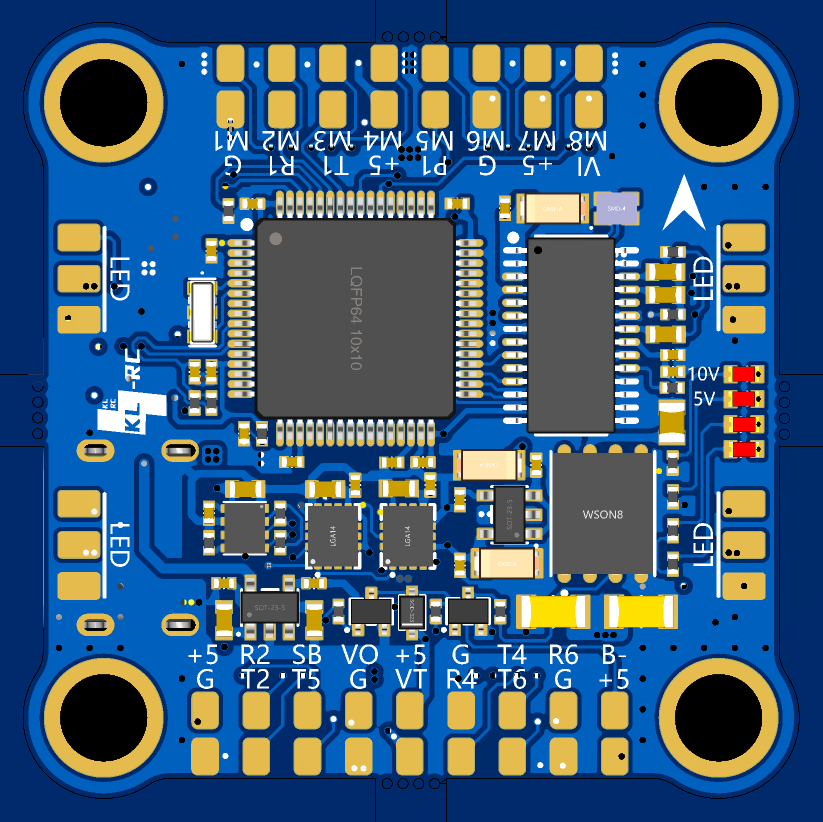
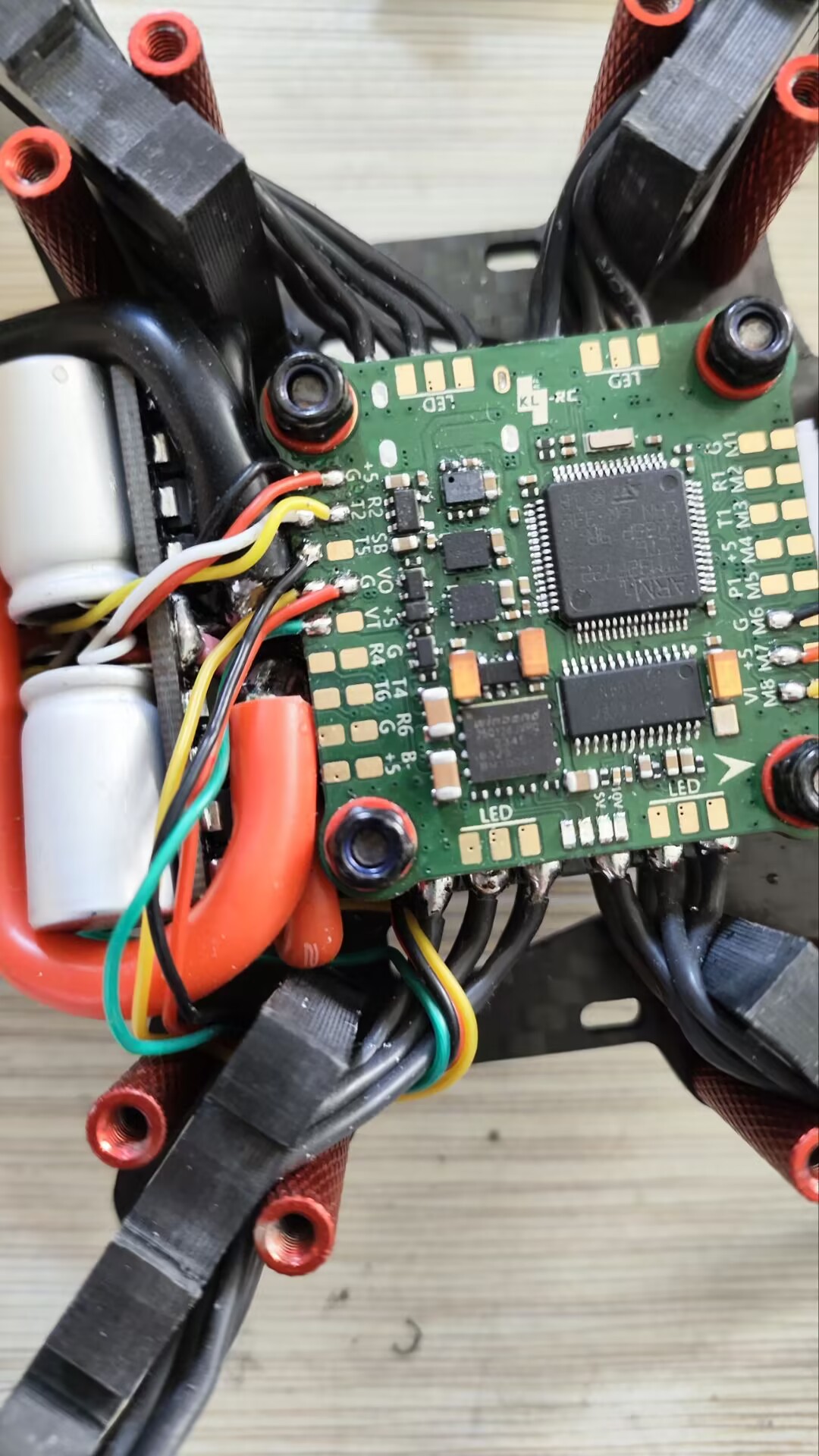
MCU power
supply, ESC terminals, silkscreened “GB5678RC” meaning “GND,VBAT,M5,M6,M7,M8,RX5,CURR”, pay attention to the wiring sequence when wiring, ESC
terminals, silkscreened “GB1234RC” meaning “GND,VBAT,M5,M6,M7,M8,RX5,CURR”, pay attention to the wiring sequence when wiring,
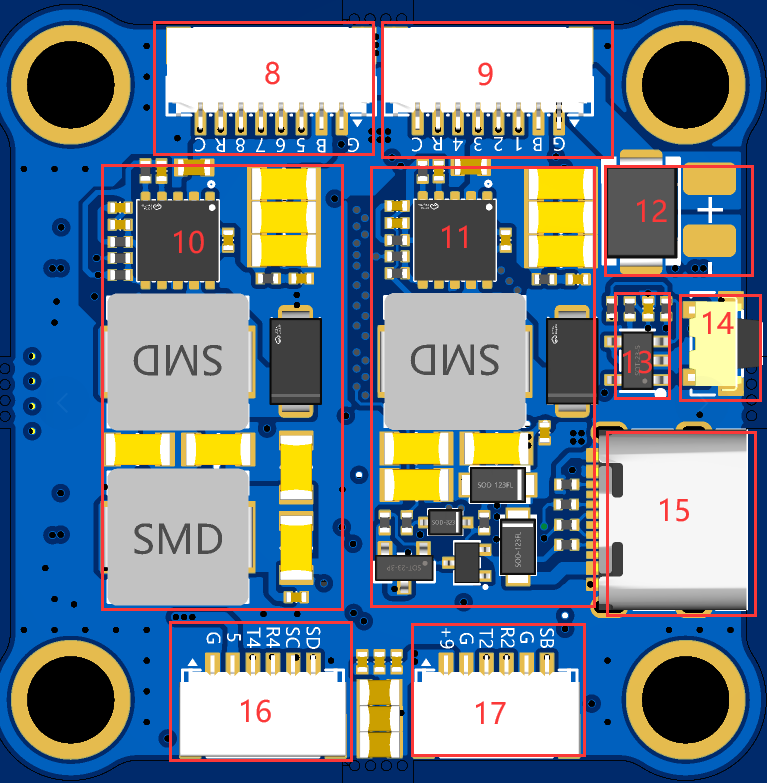
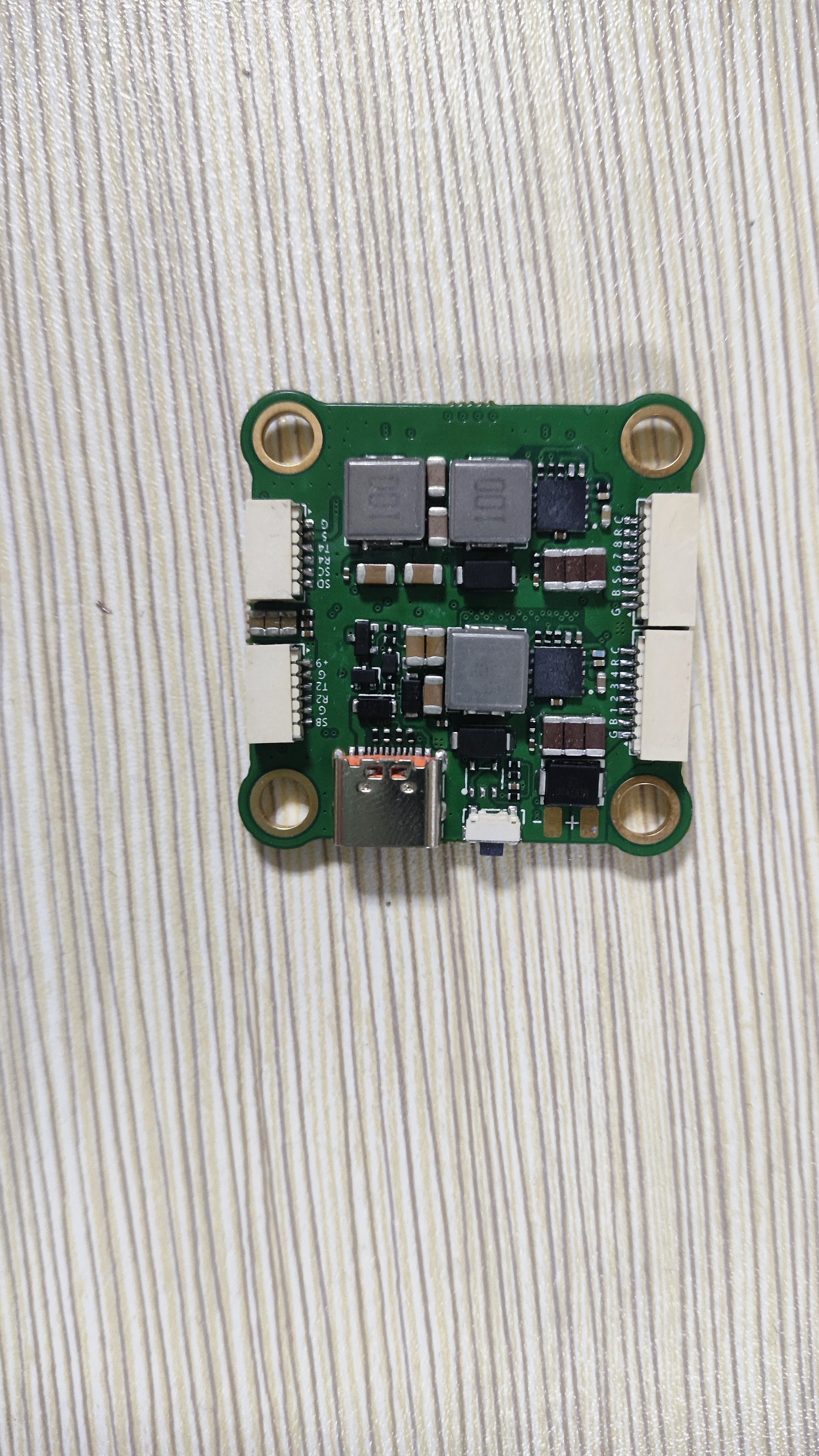
9V BEC power supply, maximum output current 4A, with LC filter, lower ripple
9V The BEC power supply uses an SMB-packaged TVS diode with a maximum output current of 4A
. For 6S voltage, an SMBJ30CA diode can be soldered; for 10S voltage, an AMBJ48CA
dual-channel current meter fusion adder chip can be soldered to add the two current meters together.
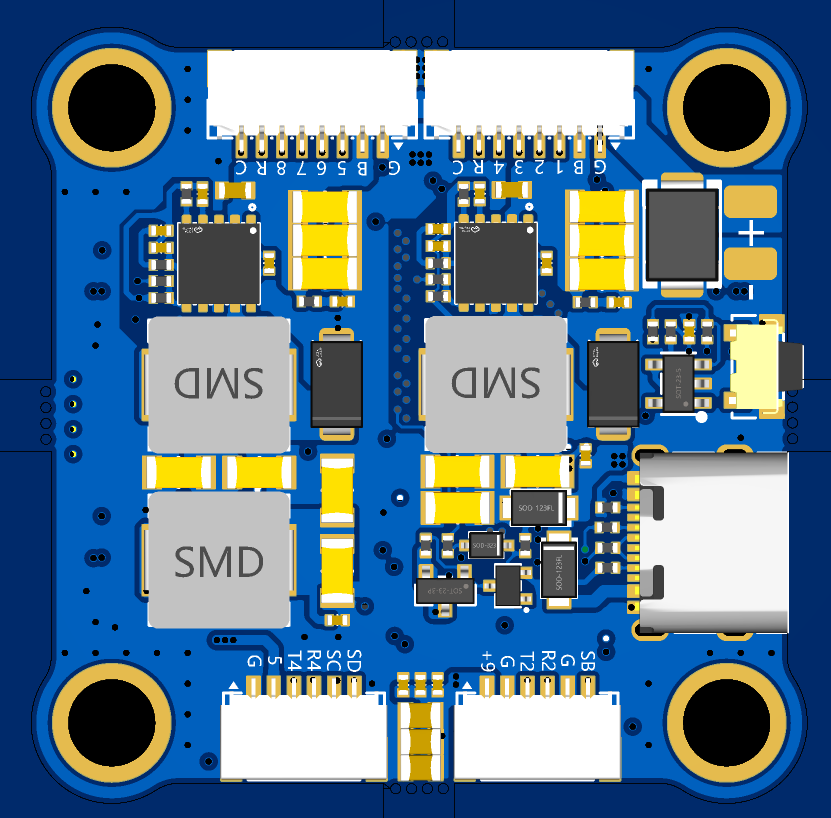
The BOOT button,
TYPE-C interface
, and GPS interface are marked "SD,SC,R4,T4,5,G", meaning "SDA,SCL,RXD4,TXD4,+5V,GND". Pay attention to the wiring sequence when connecting
. The DJI interface is marked "SB,G,R2,T2,G,+9V", meaning "SBUS,GND,RXD2,TXD2,GND,+9V,". Pay attention to the wiring sequence when connecting.
V. Usage Instructions
: Firmware Burning: Press and hold the BOOT button, connect the flight controller USB to the computer, release the BOOT button to enter DFU mode. Then use Betaflight Configurator or other ground stations to burn the firmware. For INAV firmware burning, please use the INAV ground station. (Firmware attached)
If it's INAV firmware, the next steps involve configuration and parameter tuning on the ground station. If it's BF firmware, you'll also need to flash a specific configuration file via the CLI command line. (BF configuration file attached)
VI. Notes
: Several points to note during the creation process:
Replicating this project is quite difficult. The smallest component uses a 0402 package, which is challenging to solder. It requires exceptional patience (potentially requiring multiple debugging sessions, or even crashes), as well as strong learning abilities and the capacity to solve problems through various methods, including but not limited to soldering, firmware flashing, and proper firmware usage. Therefore, this project is only recommended for model enthusiasts who have experience with drones, are skilled at soldering surface-mount components, and have some understanding of PCBs and components. Please carefully consider your hands-on and problem-solving abilities before deciding whether to replicate this project.
Power Supply Voltage Selection: The theoretical maximum input voltage for this flight controller is 60V. To allow for a margin of safety, it is recommended to use 3-10s model aircraft batteries or 18650/21700 battery packs for power supply. The image transmission voltage is controllable and requires PINIO configuration.
Component Selection: Filter capacitors need to be selected based on the input voltage (it is recommended to purchase capacitors from LCSC; Taobao often has issues with falsely advertised specifications, and more common capacitors can be purchased from a certain Taobao seller).
When soldering, please use silicone wire (28-30AWG) to connect the flight controller to prevent the solder pads from detaching under stress.
It is recommended to use hot melt glue to secure the six 10-pin SH1.0 connectors after soldering to prevent the solder pads from detaching under stress.
Pay attention to the wiring sequence! Pay attention to the wiring sequence! Pay attention to the wiring sequence!
The total component cost for this project is approximately 80 RMB. However, note that the flight controller cost often only accounts for a small portion of the overall drone cost.
Open source license: CC-BY-NC-SA 3.0, Creative Commons Attribution-NonCommercial-ShareAlike.
The flight controller is compatible with HAKRC F722V2 firmware. If the IMU cannot be recognized, please select the "Core Only" option during flashing.
The current meter uses an op-amp for addition, dividing the two current meter readings by 2 before adding them together. This results in a dead zone and inaccuracy in the current meter readings. Note that
the flight controller design is based on the Chongshan ST32 standard version. Permission has been obtained from the author, Xiao An.
CC: Abbreviation for Creative Commons license.
BY: Attribution. You must give appropriate attribution, provide a link to this license, and indicate whether modifications were made (to the original work).
NC: Non-Commercial. You may not use this work for commercial purposes.
This design is provided "as is" without any guarantee of employment or warranty, and we are not liable for any damage or loss to the creator or any third party's person or property caused by product design, improper operation, or violation of local laws and regulations.
VII. Test Video
The video demonstrates the testing of the built-in onboard IMU, barometer, OSD, and external GPS when the flight controller is connected to the BF ground station after being connected to the computer.
// Please see the attachment for the demonstration video .
VIII. Real Photos
Please download the attached source file. Opening it with an editor may result in errors (as it is directly copied), so please download and open the attachment.








 京公网安备 11010802033920号
京公网安备 11010802033920号

 1-1393654-0
1-1393654-0



