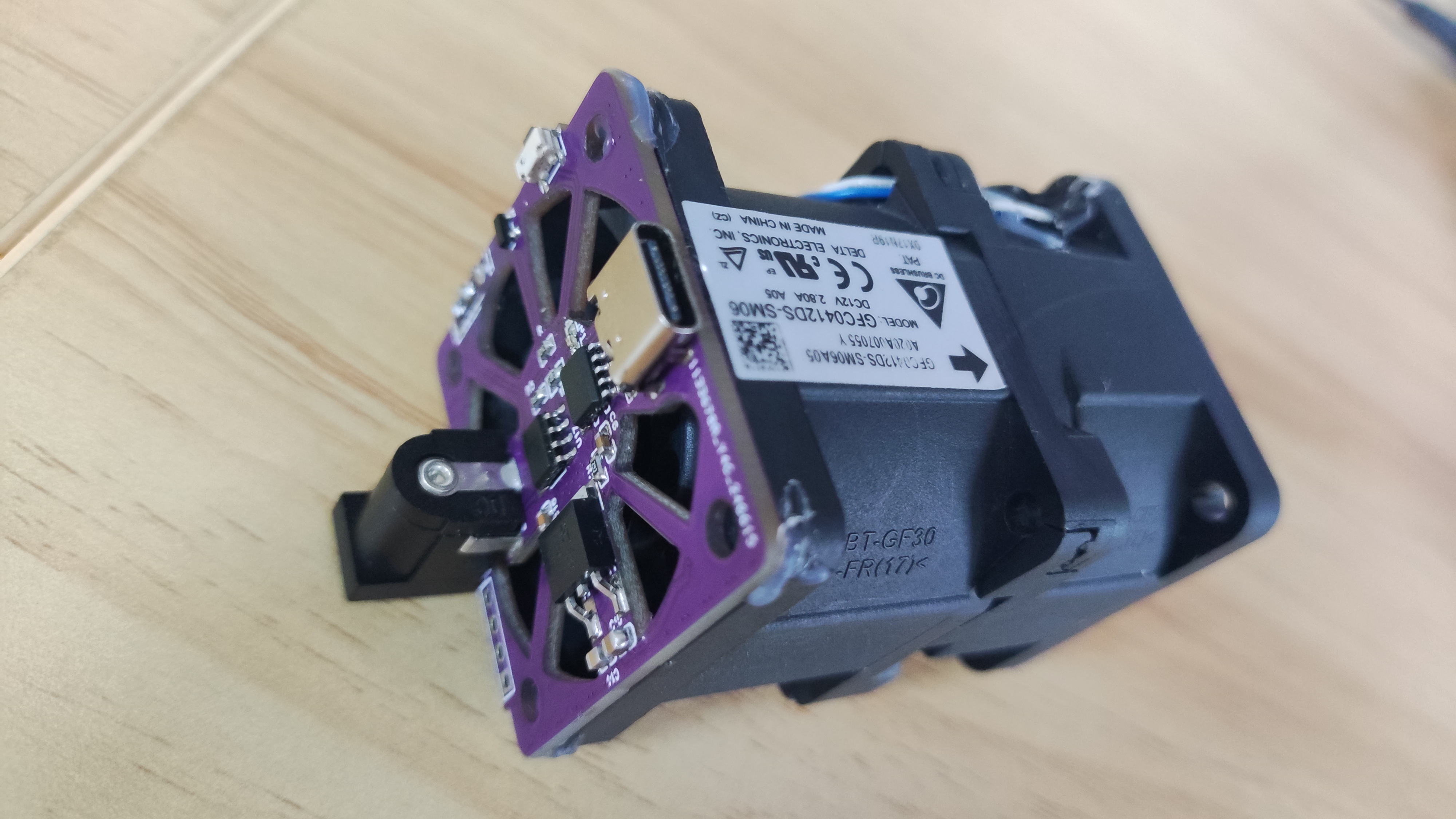
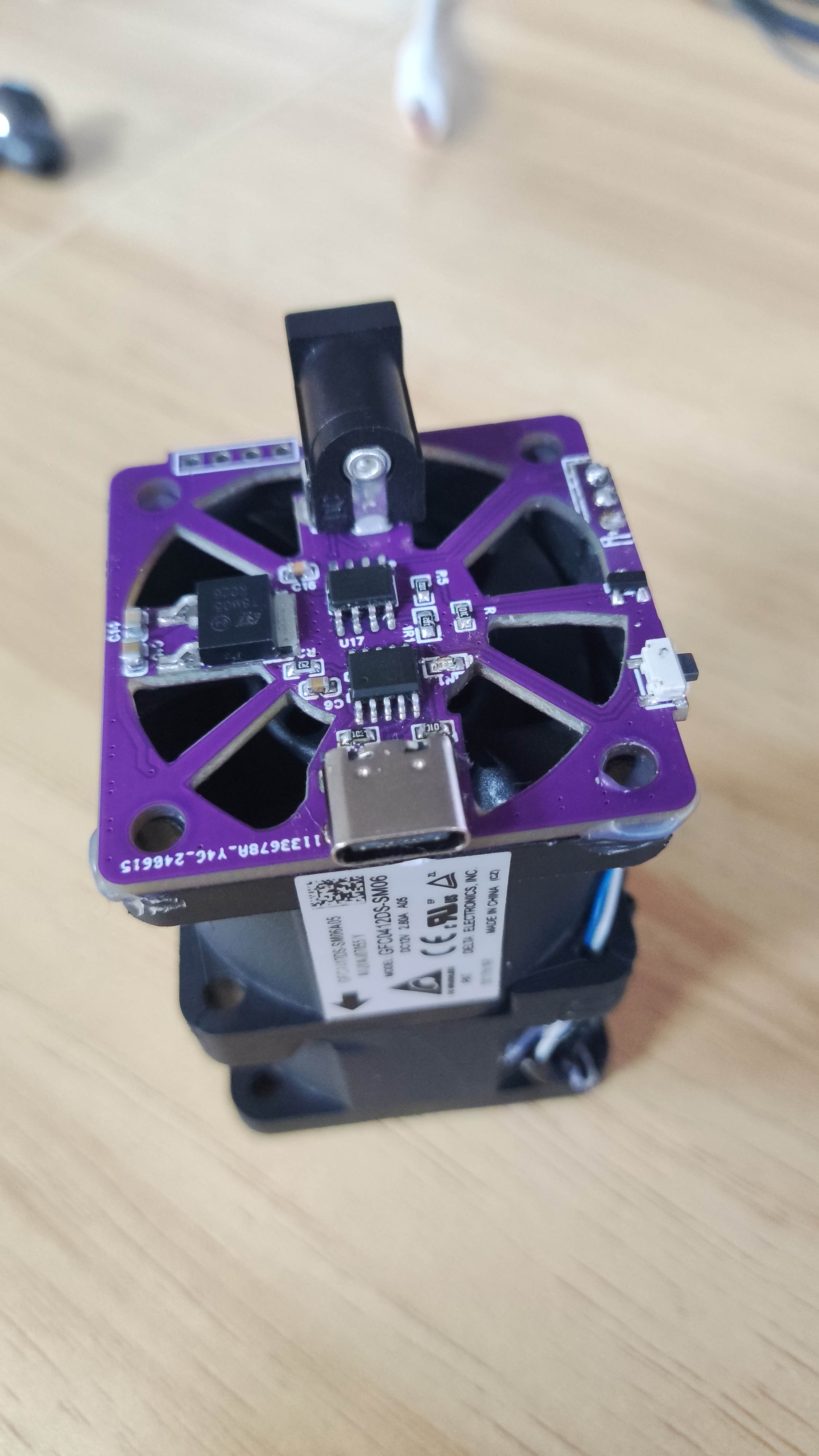
The fan used is a GFC0412DS, 40*40 cm in size. The price on Taobao is as follows: Mine was salvaged from another device

and is controlled by an 8-pin STC8G1K08A-36I-SOP8 microcontroller.
The button logic is
: 0 speed: stop (initial speed); 1 speed: slow; 2 speed: medium; 3 speed: high; 4 speed: fastest. The LED indicator light
illuminates
for 1 second after the microcontroller is powered on, then turns off. The LED flashes faster with each speed increase, until it remains lit at the highest speed. The firmware is attached.
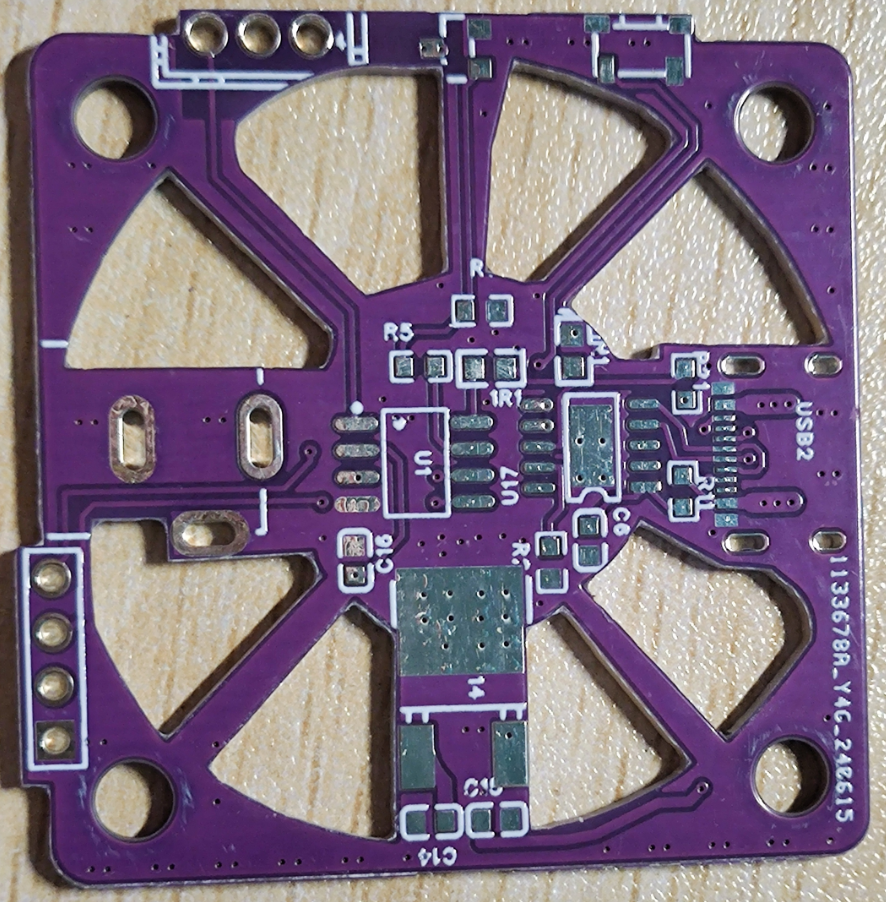
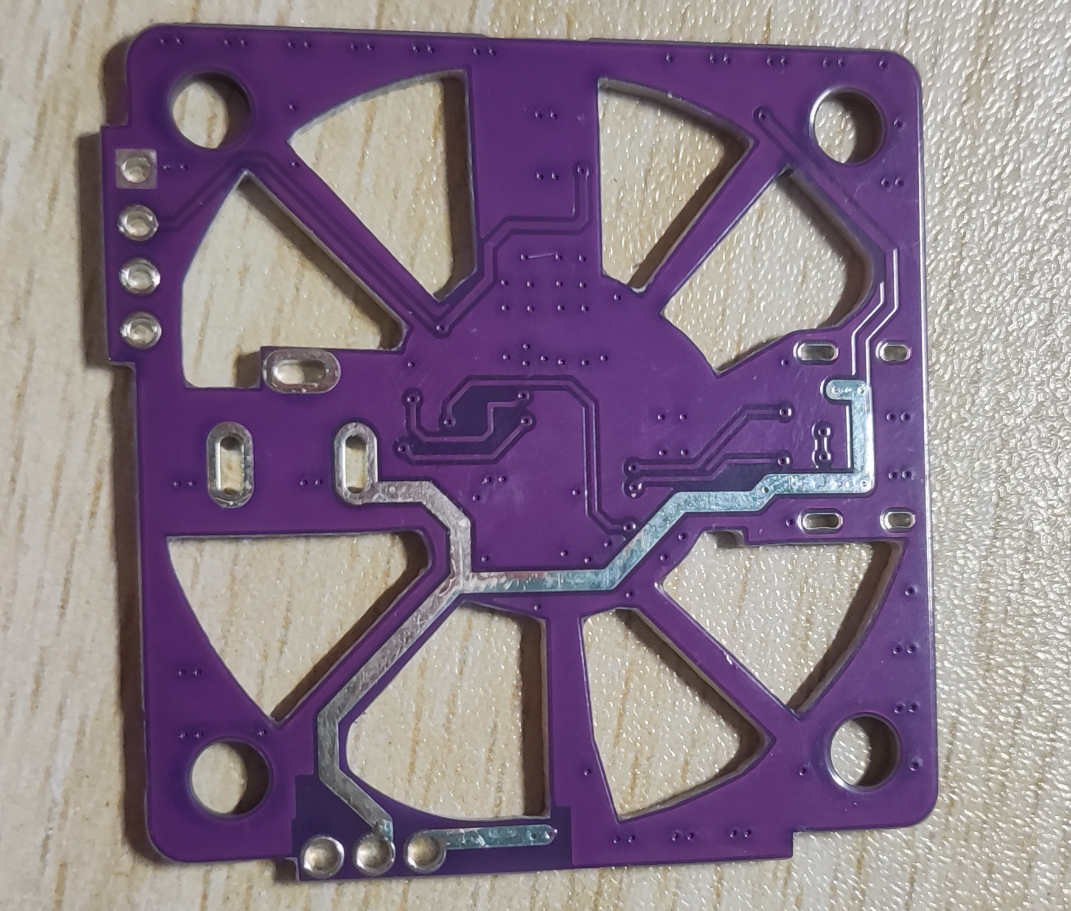
For
board fabrication, choose version 78M05.
The solder mask layer on the back of the board has been removed; you can add solder to increase the current.
Source code reference:
#include
// Define ports #define FAN_POWER_PIN P32 #define LED_PIN P33 #define PWM_PIN P54 #define SWITCH_PIN P55
// Define PWM frequency #define PWM_FREQUENCY 25000
// Speed definition #define GEAR_0 0 #define GEAR_1 1#define GEAR_2 2#define GEAR_3 3#define GEAR_4 4
// Define the duty cycle corresponding to the gear unsigned char duty_cycle[] = {0, 51, 102, 153, 255}; // Corresponds to 0%, 20%, 40%, 60%, 100%
unsigned char current_gear = GEAR_0; // Initial gear is 0
void delay_ms(unsigned int ms);void init_ports(void);void init_pwm(void);void set_pwm_duty(unsigned char duty);void switch_gear(void);
void main(void) { init_ports(); init_pwm(); FAN_POWER_PIN = 0; // Initially turn off the fan power // LED blinks for 1 second after power-on LED_PIN = 1; delay_ms(500); LED_PIN = 0; delay_ms(500); LED_PIN = 1; delay_ms(500); LED_PIN = 0;
while(1) { if (SWITCH_PIN == 0) { // Detect microswitch pressed delay_ms(20); // Debounce if (SWITCH_PIN == 0) { switch_gear(); while (SWITCH_PIN == 0); // Wait for button release } } if (current_gear == GEAR_0) { FAN_POWER_PIN = 0; LED_PIN = 0; } else { FAN_POWER_PIN = 1; set_pwm_duty(duty_cycle[current_gear]); if (current_gear == GEAR_4) { LED_PIN = 1; // LED stays on at the highest gear } else { LED_PIN = !LED_PIN; // LED blinks at other gears delay_ms(1000 / current_gear); // The higher the gear, the faster the flashing } } }}
void delay_ms(unsigned int ms) { unsigned int i, j; for (i = ms; i > 0; i--) { for (j = 112; j > 0; j--); }}
void init_ports(void) { P3M1 = 0x00; P3M0 = 0xFF; P5M1 = 0x00; P5M0 = 0x30;}
void init_pwm(void) { // Configure the PWM module, set the frequency to 25kHz // Assume the system clock is 24MHz PCA_PWM0 = 0x00; // Clear the PCA register PCA_PWM1 = 0x00; // Clear the PCA register CMOD = 0x02; // Set the PCA counter's operating clock source to system clock/2 CL = 0; // Clear the counter CH = 0; // Clear the counter CCAP0L = 0x00; // Set the initial duty cycle to 0% CCAP0H = 0x00; // Set the initial duty cycle to 0% CCAPM0 = 0x42; // Set the operating mode of PCA module 0 to PWM mode CR = 1; // Start the PCA counter }
void set_pwm_duty(unsigned char duty) { CCAP0L = duty; // Set the low byte of the duty cycle CCAP0H = duty; // Set the high byte of the duty cycle }
void switch_gear(void) { current_gear++; if (current_gear > GEAR_4) { current_gear = GEAR_0; }}








 京公网安备 11010802033920号
京公网安备 11010802033920号

 PB42WG-2409Z21H30
PB42WG-2409Z21H30



