Porting PX4 to ESP32 is an idea I have always had. After learning that NuttX already supports ESP32, I also started the project of porting PX4. After several months of painful torture, it finally ran successfully on a single core and could fly stably. Although it has many shortcomings, it can be regarded as an explanation of the idea that I have always had.
现在仅将ESP32单核移植并试飞成功,双核经过尝试后有诸多问题,仍未解决。
请确保使用小轴距四轴进行测试。由于单核负载已达98%,且有诸多位置问题无法解决,所以确保安全不要在大轴距飞行器上使用。
现在使用的是ESP32模块的FLASH机型参数保存,经测试有一定概率丢失配置。
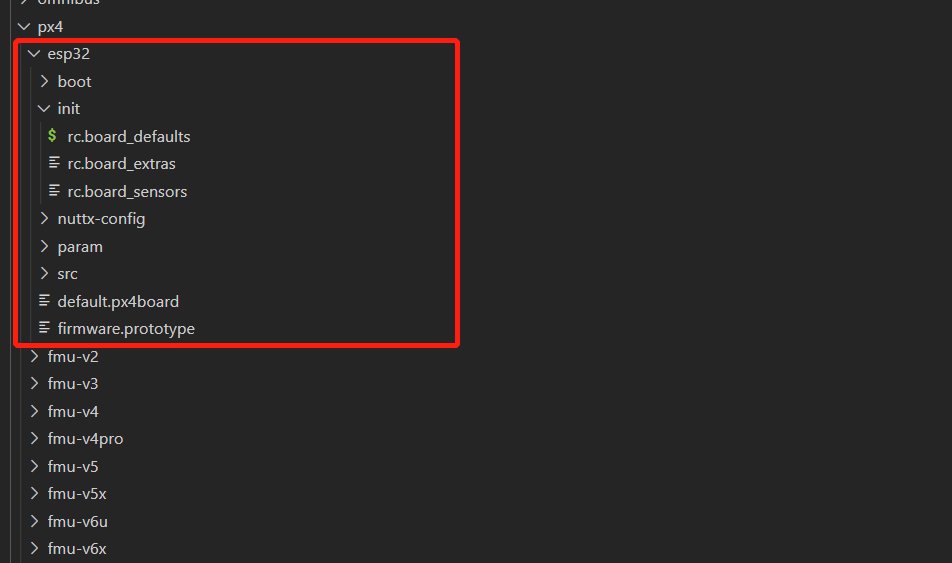
PX4 source code that supports ESP32 [Please use the single_core_esp32 branch]
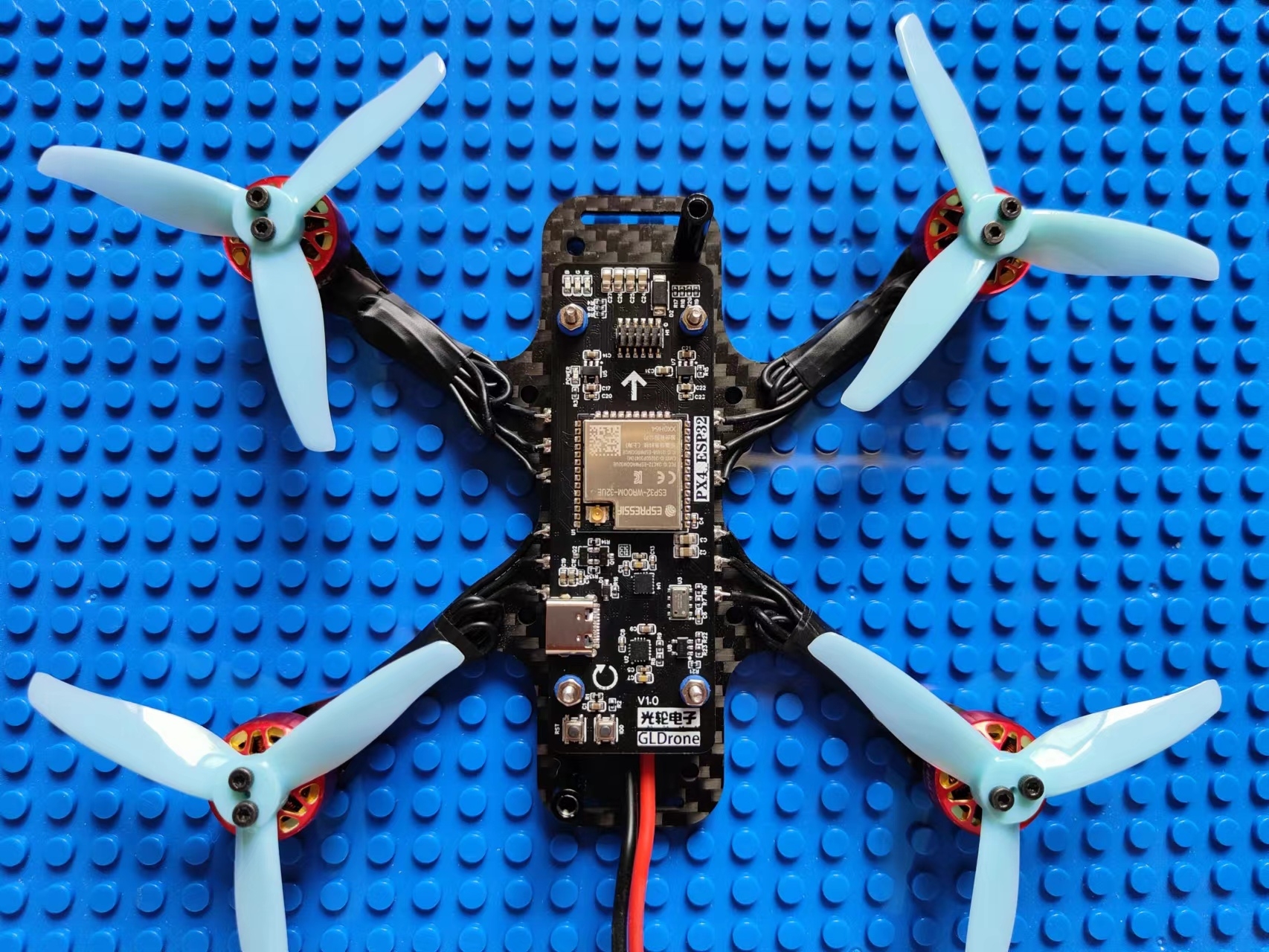
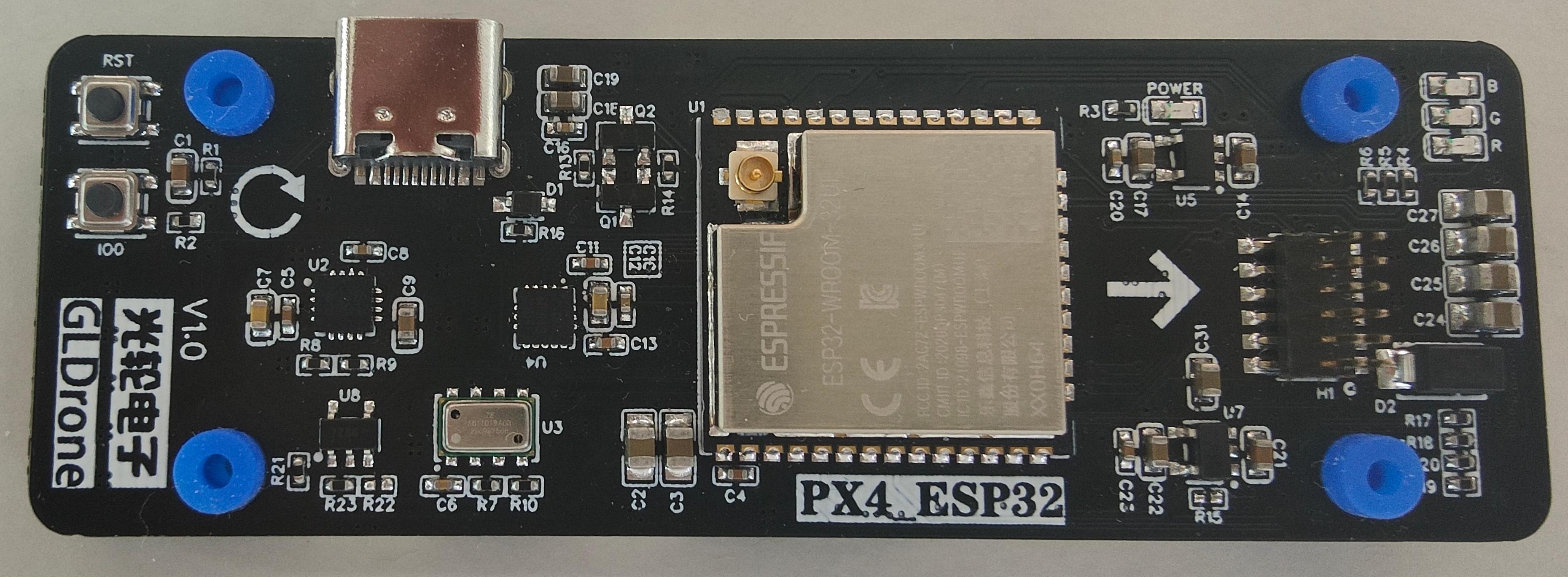
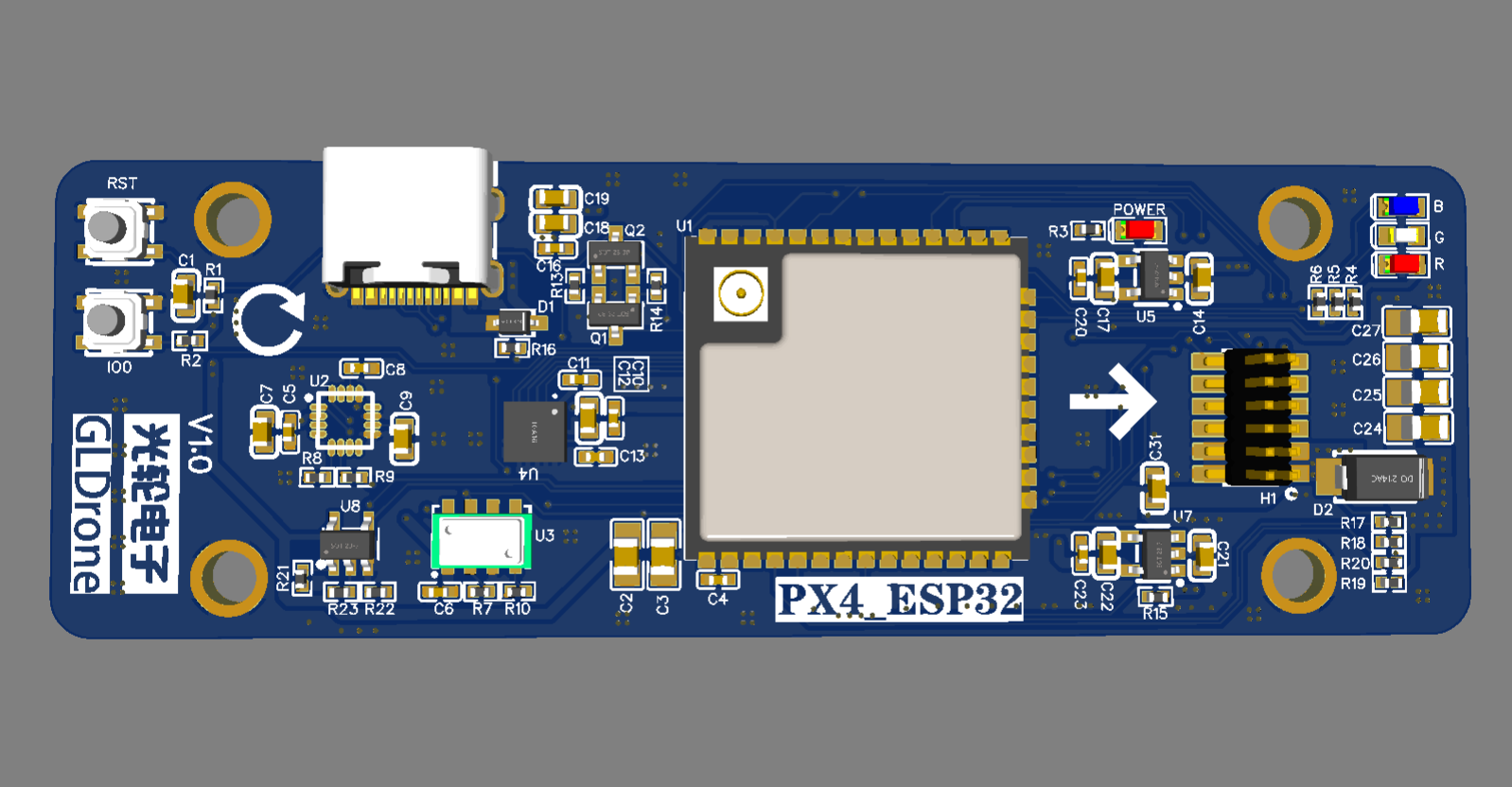
PCB and schematic diagram [Lichuang EDA] For
the open source small frame and ESC, please go to the configuration file of the open source quadcopter GLDrone
QGC for reference
!!! note
Please first learn and master the method of compiling PX4 source code! For more information, please read the PX4 documentation https://docs.px4.io/master/en/dev_setup/building_px4.html
xtensa-esp-elfthe compiler xtensa-esp-elfgit clone https://github.com/guanglun/PX4-Autopilot.git --recursive -b single_core_esp32
make px4_esp32_default
The successful compilation is as follows: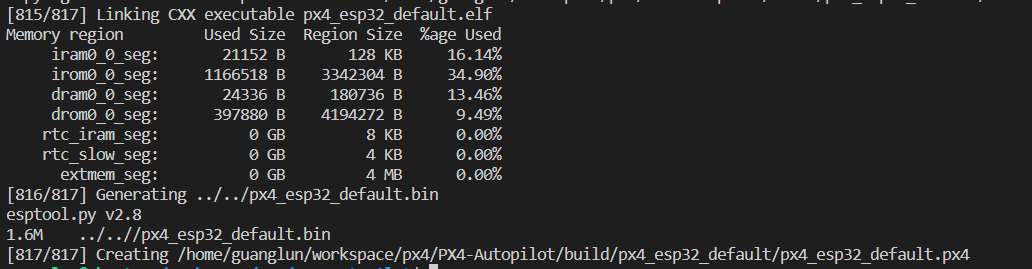
./Tools/flash_esp32.sh -f true
./Tools/flash_esp32.sh
run topcmd: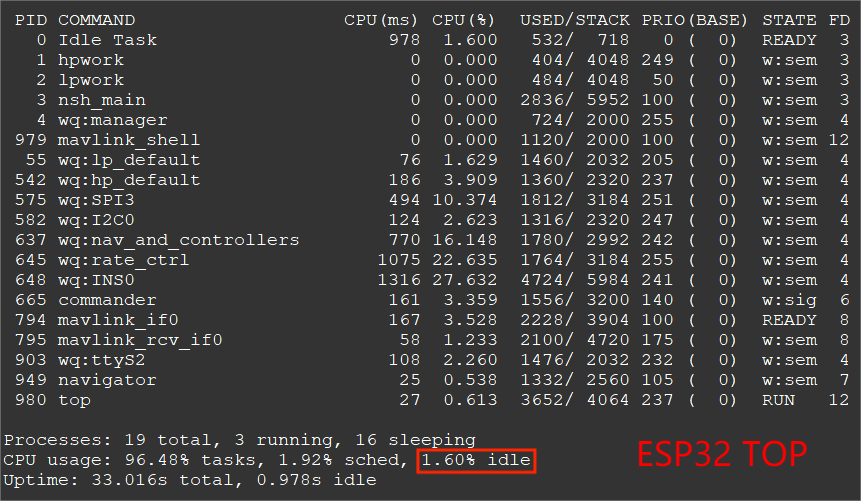
run uorb topcmd: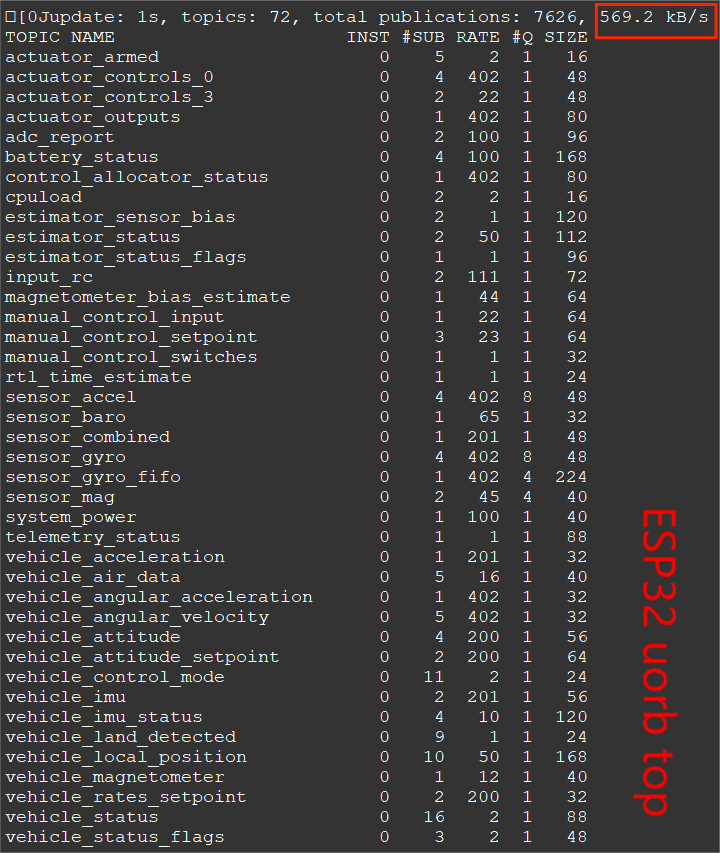
https://www.bilibili.com/video/BV1VZ4y1h7sa/

All reference designs on this site are sourced from major semiconductor manufacturers or collected online for learning and research. The copyright belongs to the semiconductor manufacturer or the original author. If you believe that the reference design of this site infringes upon your relevant rights and interests, please send us a rights notice. As a neutral platform service provider, we will take measures to delete the relevant content in accordance with relevant laws after receiving the relevant notice from the rights holder. Please send relevant notifications to email: bbs_service@eeworld.com.cn.
It is your responsibility to test the circuit yourself and determine its suitability for you. EEWorld will not be liable for direct, indirect, special, incidental, consequential or punitive damages arising from any cause or anything connected to any reference design used.
Supported by EEWorld Datasheet
EEWorld
subscription
account

EEWorld
service
account

Automotive
development
community

Robot
development
community

About Us Customer Service Contact Information Datasheet Sitemap LatestNews



Room 1530, 15th Floor, Building B,
No.18 Zhongguancun Street,
Haidian District,
Beijing, Postal Code: 100190
China
Telephone: 008610 8235 0740
 京公网安备 11010802033920号
京公网安备 11010802033920号

 GS832032GT-133I
GS832032GT-133I