Weighing only 0.26g, this Arduino ornithopter flight control board is open source!!
1. **Disclaimer:** This small open-source solution was actually developed a long time ago, but I felt it was somewhat unnecessary to release it before. I thought people with some hardware experience wouldn't need or even consider this open-source solution, and complete beginners would be better off buying a ready-made one. Therefore, fearing criticism from both experts and beginners (please, both sides, have mercy!), I kept putting it off. However, I did promise fans in previous video comments and private messages to open-source this hardware, and considering the needs of the Butterfly project from Mechatronics, weight reduction is still very meaningful, so I decided to release it for those who need it, hoping it can help those who require it.
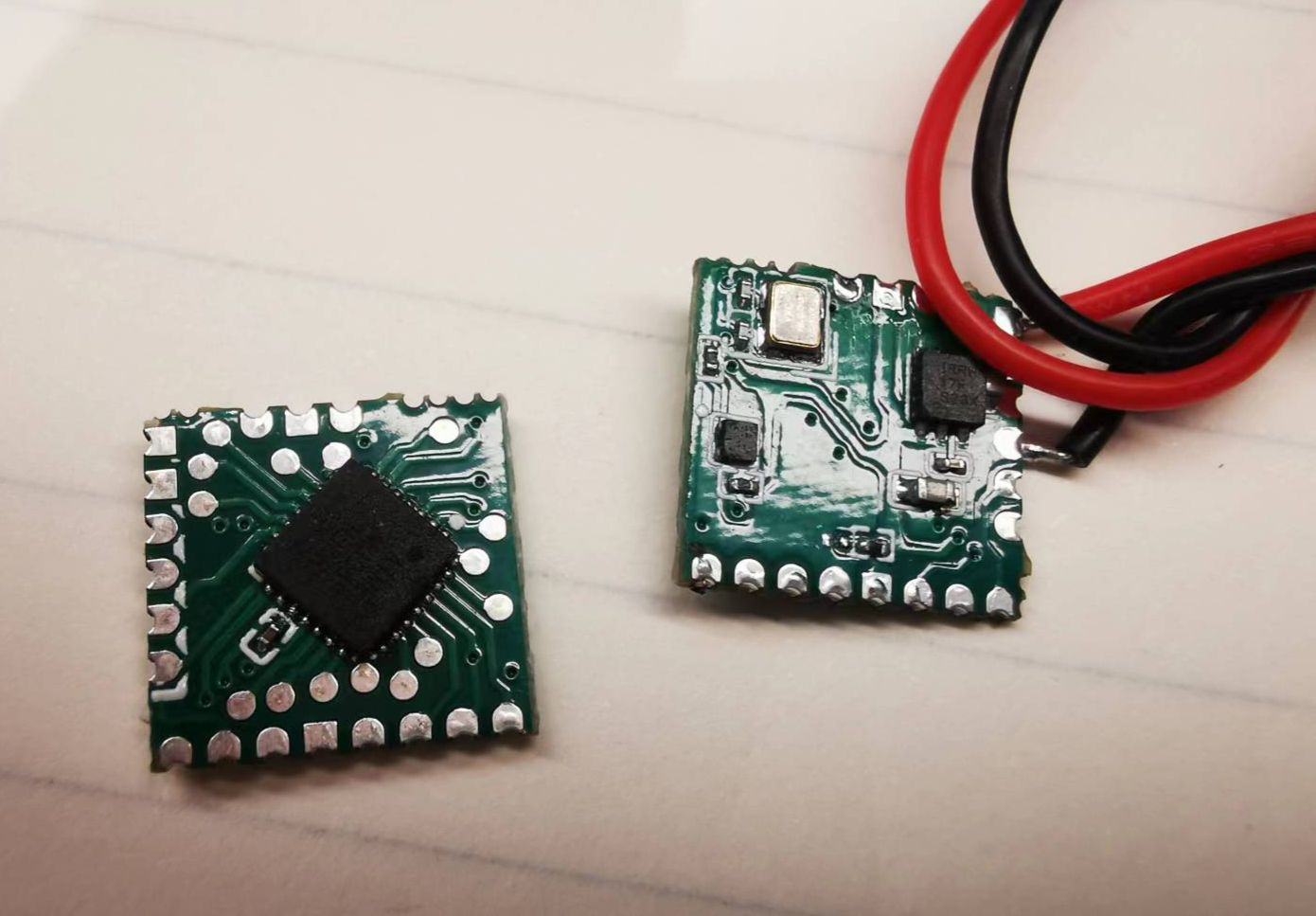
2. **Hardware Solution Introduction:** This is a minimal system development board based on the ATMEGA328P-MMHR, with an ultra-small size of 10mm×10mm. The board integrates a 5V, 1A LDO, supporting 2S~3S lithium battery input (2S lithium battery recommended). Since it was initially designed for flight control of a micro ornithopter, an SBUS reverse circuit was also integrated. Two versions of the board were designed and prototyped, both supporting hardware interfaces and both ISP and serial port download methods (the newly prototyped board requires ISP download of the bootloader; you can search for specific download methods yourself).
① One version has all pins exposed through 1.27mm pitch half-hole pads, suitable for use as a micro Arduino development board in applications with extremely limited space;
② The other version exposes only some pins: serial port, SPI programming pins, and two multi-function I/O ports, suitable for micro ornithopters. PB3 and PB4 can be used to control the two servos of the ornithopter, and PB5 can be used as the PPM signal input. SBUS pin pads are also exposed.
3. Instructions for Use:
① This is an open-source hardware project; even a simple one requires some basic hardware and software knowledge. If you encounter any problems, please search for solutions yourself first. Thank you.
② The board has been tested and the program can be programmed successfully. You can search for specific methods yourself.
③ This is just a hardware solution. If you're using it as a flight control system for an ornithopter, you'll need to find open-source servo ornithopter control code online and modify the PWM output pin and PPM input pin.
④ Regarding the code: Last year, I initially referenced code from a Japanese netizen. There are now many versions online with PPM signal input modified from his code; please search for them yourself (so please don't ask me for the code, I don't have it! I don't have it! I don't have it!). Currently, our code has been completely refactored. The hardware is based on ESP32, and the code uses both SBUS and ESPNOW protocols, so we no longer use PPM (few channels, not resistant to interference). We will also be removing the independent signal receiver soon (sorry, these are not currently open source! So please don't ask me! Please don't ask me! Please don't ask me! Thank you! Thank you! Thank you!).
⑥ If you have read the above information and can use this open-source hardware solution, here are a few helpful tips that I hope will be of assistance.
⑦ Regarding programming, please search for keywords like "Arduino boot loader programming" for specific programming methods. You can use a 1.27 probe programming clip or soldered cables.
⑧ Why make it so small and light? Because for a micro ornithopter, extreme weight reduction is necessary (weigh a few butterflies or bees and you'll understand). Even a 0.1g reduction is significant! So please, if you use this solution, do not use: 2.54 header pins! Do not use servo connectors! Do not use JST 2.54 power connectors! Do not use thick silicone wires! ... All that hard work to reduce weight will be wasted if you use the wrong header pins or connectors. Weigh every component, cable, and connector.
⑨ You can try JST 1.25 air-to-air connectors for power connectors; for motors and servos, just solder the wires directly. You can use 30AWG silicone wire or suitable soft enameled wire (the kind used for headphones).








 京公网安备 11010802033920号
京公网安备 11010802033920号

 TC54VC4201EMBRTP
TC54VC4201EMBRTP



